



")
Najlepiej ich nie kupować.
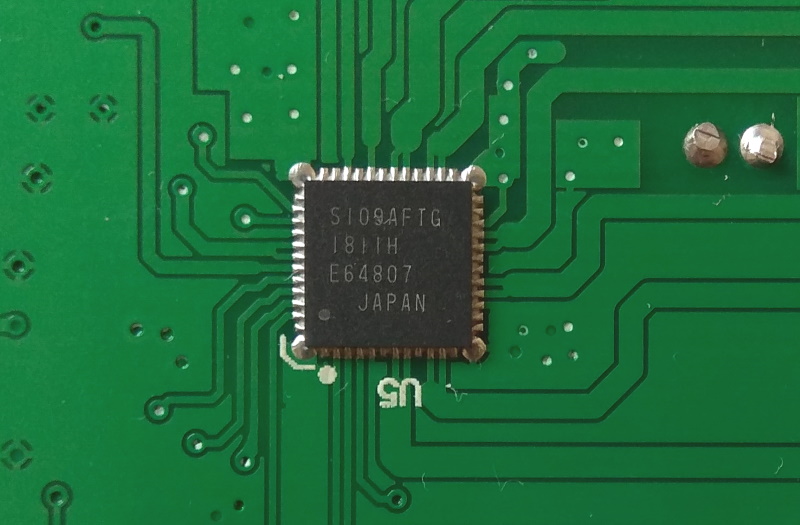
A co jeśli już je kupiliśmy, przegapiliśmy okres na zwrot, a podłączone do silników nie potrafią ich rozpędzić i gubią kroki? Zacznijmy od pogodzenia się z tym, że kupiliśmy szmelc. Prawdziwe drivery TB6600 (datasheet) obsługują max. 1/16 kroku i 4,5A. Nasze podróbki mają w środku TB67S109A (oznaczenie S109AFTG, datasheet), który obsługuje max. 1/32 kroku, ale tylko 3,0A. Datasheet podaje max. częstotliwość kroków jako 100 kHz. Pomimo to, z powodu oszczędności w budowie płytki sterownika, w praktyce zdarza się, że gubią pojedyncze kroki już przy 2 kHz, a powyżej 15 kHz całkiem wymiękają. Co to oznacza? Przy mikrokroku 1/8 można spodziewać się dobrej pracy do 1 obrotu/s, a przy 9 obr/s silnik się zatrzyma i to nie z powodu braku mocy.
https://youtu.be/LpTFosPVQfc
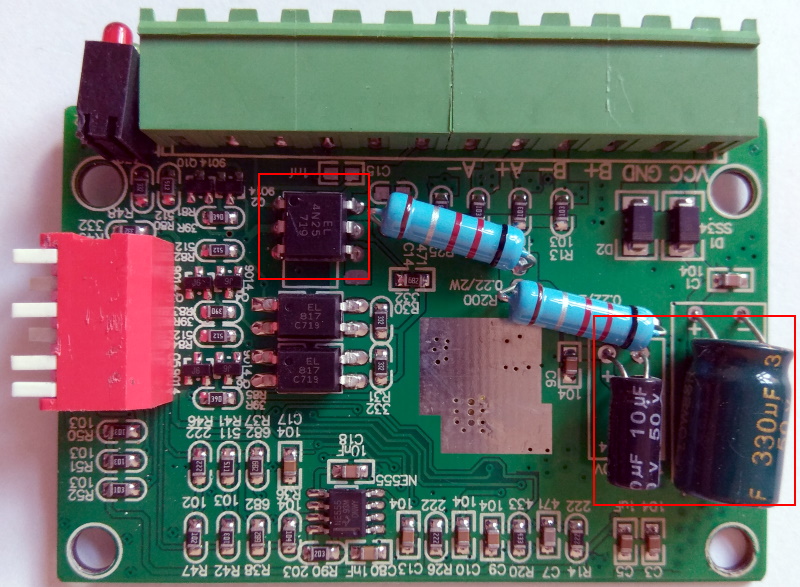
Ale nie wszystko stracone. Mając lutownicę i budżet paru zł można spróbować je ulepszyć. Przy czym przez ulepszenie mam na myśli wymianę optoizolatorów na takie, jakie powinny tam się znaleźć od początku. W najtańszych wersjach sterownika do transmisji sygnału kroku zastosowane są optoizolatory 4N25 (lub pokrewne), które już przy kilku kHz bardzo mocno zniekształcają sygnał. Powinny być użyte minimalnie droższe 6N137. Drugorzędna sprawa to kondensatory: u mnie były 10uF (zamiast 100uF) i 330uF (zamiast 470uF). Wymiana na zgodne z oznaczeniami na płytce na pewno nie zaszkodzi.
Potrzebne będą:
- optoizolator 6N137
- kondensator ceramiczny 100nF (wymagany do prawidłowego działania 6N137)
- drucik
- podstawka DIP-6 (opcjonalnie)
- kondensatory elektrolityczne 100uF/50V i 470uF/50V
Podstawowym problemem wydaje się niezgodność wyprowadzeń 4N25 (6 pinów, datasheet) i 6N137 (8 pinów, datasheet). Przyglądając się uważniej oznaczeniom nóżek, można zauważyć, że piny 2-7 układu 6N137 mają analogiczną funkcję do pinów 4N25. Pozostałe piny to 1 - niepołączony (NC) oraz 8 - zasilanie (Vcc).
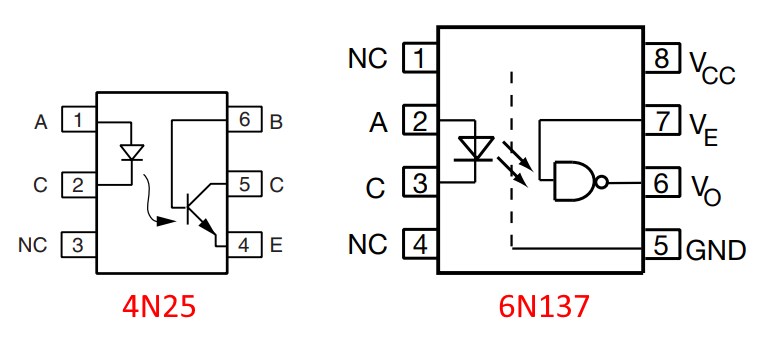
Możemy więc na początek wlutować piny 2-7 układu 6N137 w miejsce 4N25. Pin 1 NC proponuję uciąć. Pozostanie kwestia dodania kondensatora odsprzęgającego 100nF oraz podłączenia zasilania Vcc 5V. Kondensator można przylutować bezpośrednio do nóżek układu
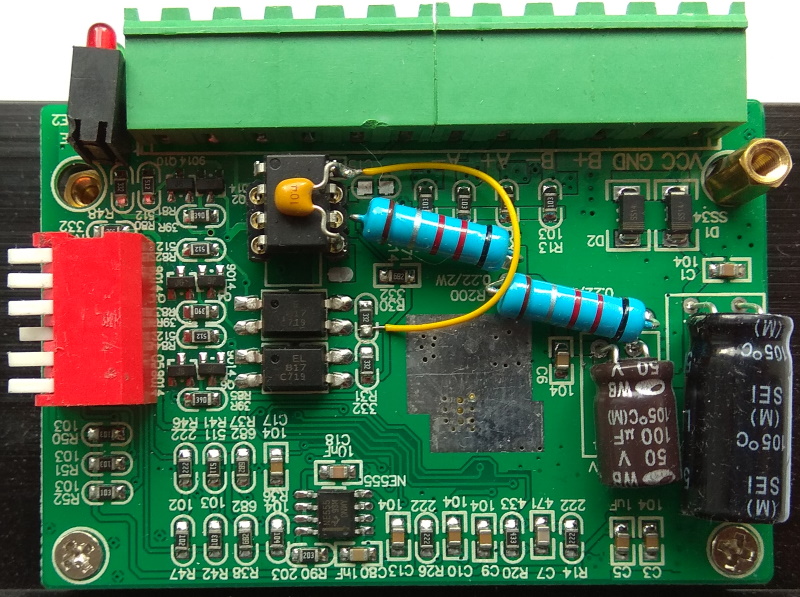
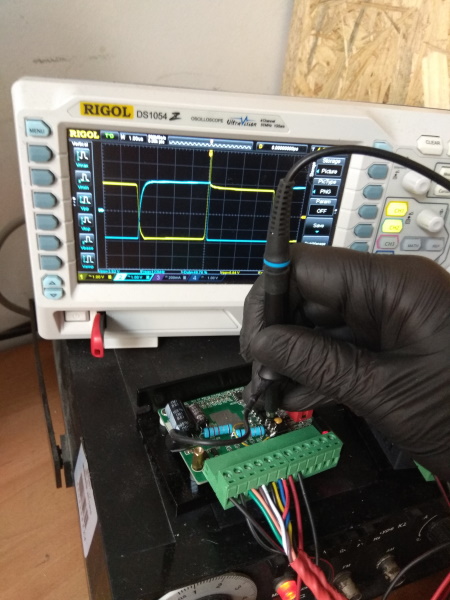
To wszystko! Porównanie sterownika w stanie fabrycznym z poprawionym zamieściłem w filmie z początku posta. Załączam też zrzuty z oscyloskopu dla obu sterowników z porównaniem zniekształcenia sygnału wyjściowego dla różnych częstotliwości sygnału wejściowego.
Inspiracja:
- MYCNCUK: TB6600 / HY-DIV268N-5A Problems, and possible solutions
- CADduino: Low Cost Toshiba TB6600 Driver Board



")






