Strona 1 z 4
Problem z osia Z
: 17 wrz 2015, 15:05
autor: kucharzb
Witam,
chciałbym się przywitać na forum - to moj pierwszy post.
Mam amatorska maszynke CNC, ktorej bede uzywal do prostych prac w drewnie i ew grawerowania napisow.
Uzywam CAMBAM + GRBL(port szeregowy zrobiony z ARDUINO).
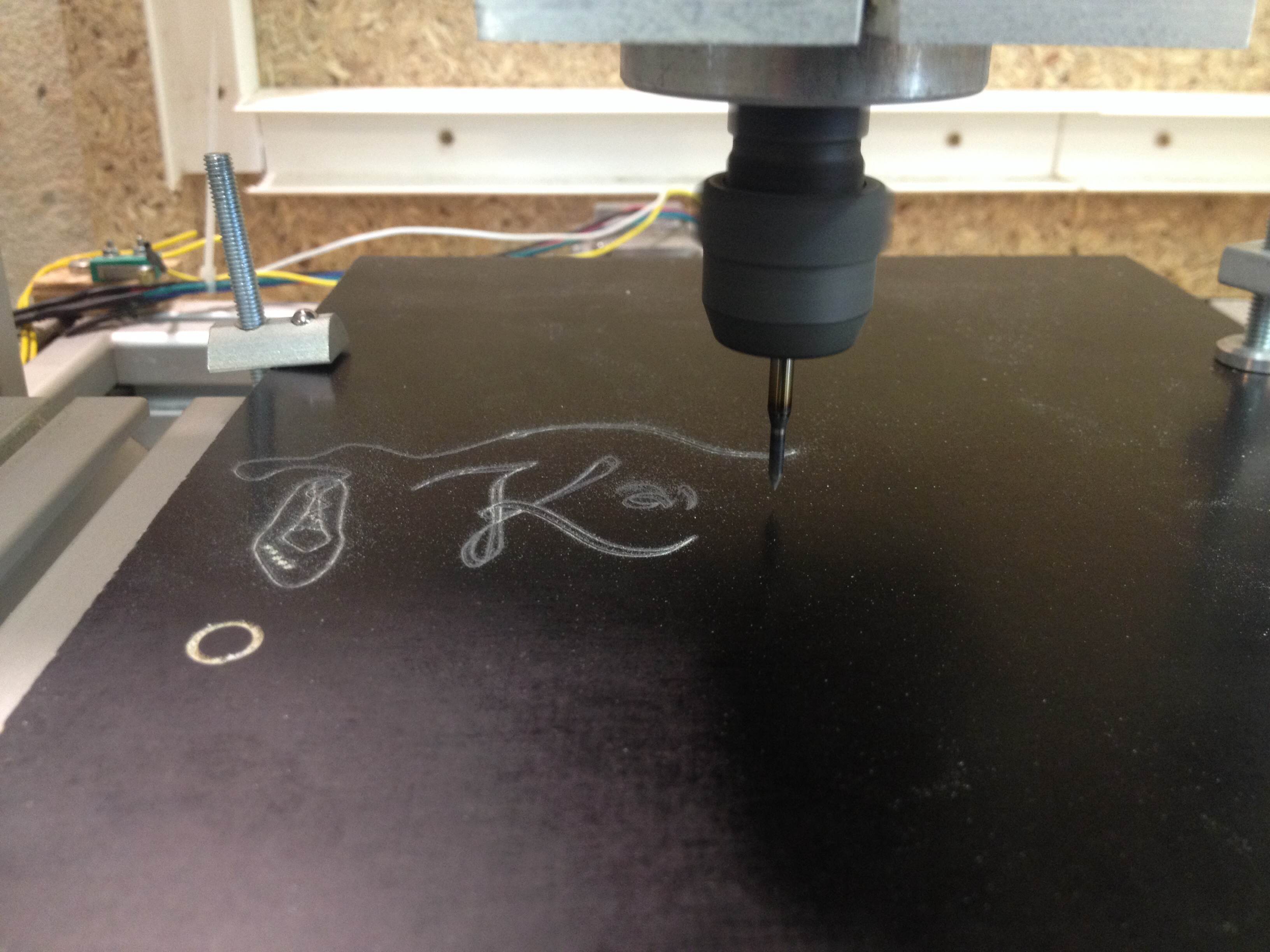
Problem jest taki, że w miarę wykonywania programu oś Z coraz mniej zagłebia wrzeciono. Do tego stopnia, ze wykonując napis, w połowie juz przestaje w ogóle grawerować.
Myślałem, że to wina nie wypoziomowanego stołu, ale wykonałem prosty program rysujący cztery okręgi w rogach i ustawiłem stół tak, zeby każde było identycznej głebokości. Niestety to nie jest źródło problemu, bo robiąc cokolwiek innego, wrzeciono zauważalnie się coraz mniej zagłębia i to niezależnie od położenia na stole.
W końcu programu jest ok 1-2mm wyżej niż w pozycji początkowej (w tym samym punkcie XY).
Silniki to WANTAI 57BYGH603B.
Załączam obraz (w trakcie pracy maszyna i juz widac, że przy kolejnej literce przestaje grawerowac).
Gdzie szukać problemu?
Pozdrawiam,
Krzysztof
: 17 wrz 2015, 17:16
autor: wojtek30
Nie wiemy jaka jest konstrukcja, może sprzęgło się ślizga, albo maszyna gubi kroki. Jak poruszasz osią w programie góra dół o stałą odległość, to wraca zawsze w tą samą pozycję?
Rozumiem że jak napiszesz prosty program rysujący np. kwadrat na cały obszar roboczy, to jedzie równo?
Może coś w Cambam, jakaś kompensacja, backlash są ustawione, nie znam tego programu.
: 17 wrz 2015, 17:32
autor: steff.k
Takie coś mogą też powodować zakłócenia spowodowane niewłaściwym podłączeniem wrzeciona. Uruchom tylko wrzeciono i zobacz czy osie się nie kręcą.
: 18 wrz 2015, 20:28
autor: ezbig
kucharzb pisze:W końcu programu jest ok 1-2mm wyżej niż w pozycji początkowej (w tym samym punkcie XY).
To podnoszenie osi jest postępujące, czy tylko do momentu aż osiągnie powierzchnię materiału? Inaczej mówiąc, jak grawerujesz to pod koniec frez porusza się nad materiałem, czy po jego powierzchni?
Zrób test poruszania osi Z góra dół ze 100 razy, badając ruch czujnikiem zegarowym, żeby stwierdzić czy problem występuje zawsze, czy tylko pod obciążeniem?
Napisz jakie masz sterowniki i jakim zasilasz je napięciem? Patrząc na parametry silnika, to chyba gorszych już nie mogłeś wybrać. Mają po 2Nm, ale wymagają aż 8V na fazę. Żeby osiągnąć rozsądne prędkości, potrzebny jest do nich drogi sterownik. Jak masz jakieś badziewie i zasilasz niskim napięciem, to może gubi kroki, bo za szybko gonisz?
: 22 wrz 2015, 07:35
autor: kucharzb
@wojtek30:
1)dokręciłem sprzęgło, ale to nie rozwiązało problemu (zamierzam jeszcze przetestować drugie sprzęgło)
2) wydaje mi się, że tak, ale przyznam szczerze, że sprawdzałem tylko na małych ruchach (+/-30mm)
3) nie, jak rysuje krótszy program to ten błąd tez wystepuje, ale przy krótkim programie jest to mniej zauważalne
4) program instalowany na swiezo, zgodnie z tutorialem robiłem wiec zakładam, ze nic nie jest dodatkowo włączone
@steff.k:
1) nie ma takiego objawu
@ezbig:
1) podnoszenie jest postępujące - im dłuszy program, tym coraz mniej zagłebia oś z (frez na końcu programu porusza się nad materiałem nawet 1-2mm)
2) spróbuję
3) sterownik to TB6560 + Arduino UNO z wgranym GRBL - napięcie podawane na sterownik to 24V
4) posuw mam ustawiony 250 mm/min - jakie silniki byś sugerował?
: 22 wrz 2015, 11:07
autor: ezbig
kucharzb pisze:@ezbig:
1) podnoszenie jest postępujące - im dłuszy program, tym coraz mniej zagłebia oś z (frez na końcu programu porusza się nad materiałem nawet 1-2mm)
2) spróbuję
3) sterownik to TB6560 + Arduino UNO z wgranym GRBL - napięcie podawane na sterownik to 24V
4) posuw mam ustawiony 250 mm/min - jakie silniki byś sugerował?
1-2) Ten test ma wykazać, czy przesunięcie jest regularne, czy losowe. Pisząc program na ruch góra-dół, przy konkretnej ilości powtórzeń, będzie to łatwiej stwierdzić.
3) Sterownik taki sobie, ale ujdzie z silnikiem do 3A/fazę i zasilaniu 24V (optymalny byłby silnik 1.2V/fazę) - Twój silnik dobrzeby sobie radził, ale przy napięciu 80-160V
4) 250mm/min to bardzo wolno. Przy takiej prędkości trudno mówić o gubieniu kroków (chyba, że mamy jakiś rezonans). Silnik powinien mieć jak najwyższy prąd na fazę i jednocześnie niskie napięcie fazy. Dzięki temu podnosząc zasilanie sterownika do 10-20 krotności napięcia fazy, uzyskujesz optymalną dynamikę pracy. Przy Twoich 8V masz tylko 3x większe zasilanie. Prąd w cewkach nie nadąża narastać przy większych prędkościach i taki silnik nie pogoni za szybko.
Ciężko stwierdzić skąd taka asymetria ruchu. Zrób test, trzeba sprawdzić, czy to jest z każdym nawrotem, czy przypadkowo.
: 22 wrz 2015, 12:27
autor: ursus_arctos
Asymetria ruchu w tę stronę może wynikać np. ze złych wyprzedzeń sygnału dir względem step.
Kolejny test, który powinien być względnie łatwy do wykonania, to przepięcie kabli silnika krokowego tak, aby odwrócić kierunek obrotu (wystarczy zamienić 2 kabelki w jednej, dowolnie wybranej fazie) - jeżeli zacznie "zaniżać" zamiast "zawyżać", to na 99.9% problem leży w cyfrowej części sterowania (np. wspomniane wyżej wyprzedzenie).
: 23 wrz 2015, 07:53
autor: ma555rek
ursus_arctos pisze:Asymetria ruchu w tę stronę może wynikać np. ze złych wyprzedzeń sygnału dir względem step..
bo ma zbyt wolne transoptory na płytce LPT i wraz z każdym nawrotem gubi po jednym lub 2 kroki - długi program - dużo nawrotów - duża różnica.
Transoptory mają zawsze różny czas załączenia i wyłączenia i dlatego kierunek się nie równoważy
: 23 wrz 2015, 10:14
autor: ursus_arctos
Drivery silników spodziewają się, że sygnał DIR (cw/ccw) jest w stanie ustalonym w momencie nadejścia sygnału STEP (czy CLK w nomenklaturze Toshiby). Dobrze jest, jeżeli jest tu pewne wyprzedzenie. TB6560 mają max. fclk = 15kHz (czyli mało) - można się zatem spodziewać, że wyprzedzenie na poziomie kilkumikrosekund jest konieczne dla pewności. Czy ten wynalazek z Arduino to zapewnie (i czy ew. pozwala regulować) - nie wiadomo; nie chce mi się czytać kodu/specyfikacji.
: 23 wrz 2015, 10:38
autor: ezbig
ma555rek, przy prędkości 250mm/min to raczej mało prawdopodobne. Tam poza tym nie ma płyty LPT. Trzeba zrobić test jazdy góra-dół, i zidentyfikować czy to jest regularne czy losowe.