



")
Zawsze mogę tam jakąś kratkę wentylacyjną wyciąć w okolicy...
Na pewno będę musiał to przemyśleć...
Wczoraj byłem w metalzbycie na polowaniu.
Pod prowadnice mam już profil 50x100x6, natomiast na belkę udało mi się wynaleźć jedynie 200x100x4 w cenie złomu.
Niestety profil leżał tam tak długo że już oblazł rdzawym nalotem i zastanawiam się jak to łatwo i przyjemnie usunąć.
Na wypadek jeszcze się trochę porozglądam za zamiennikiem w lepszym stanie i o grubszej ściance.
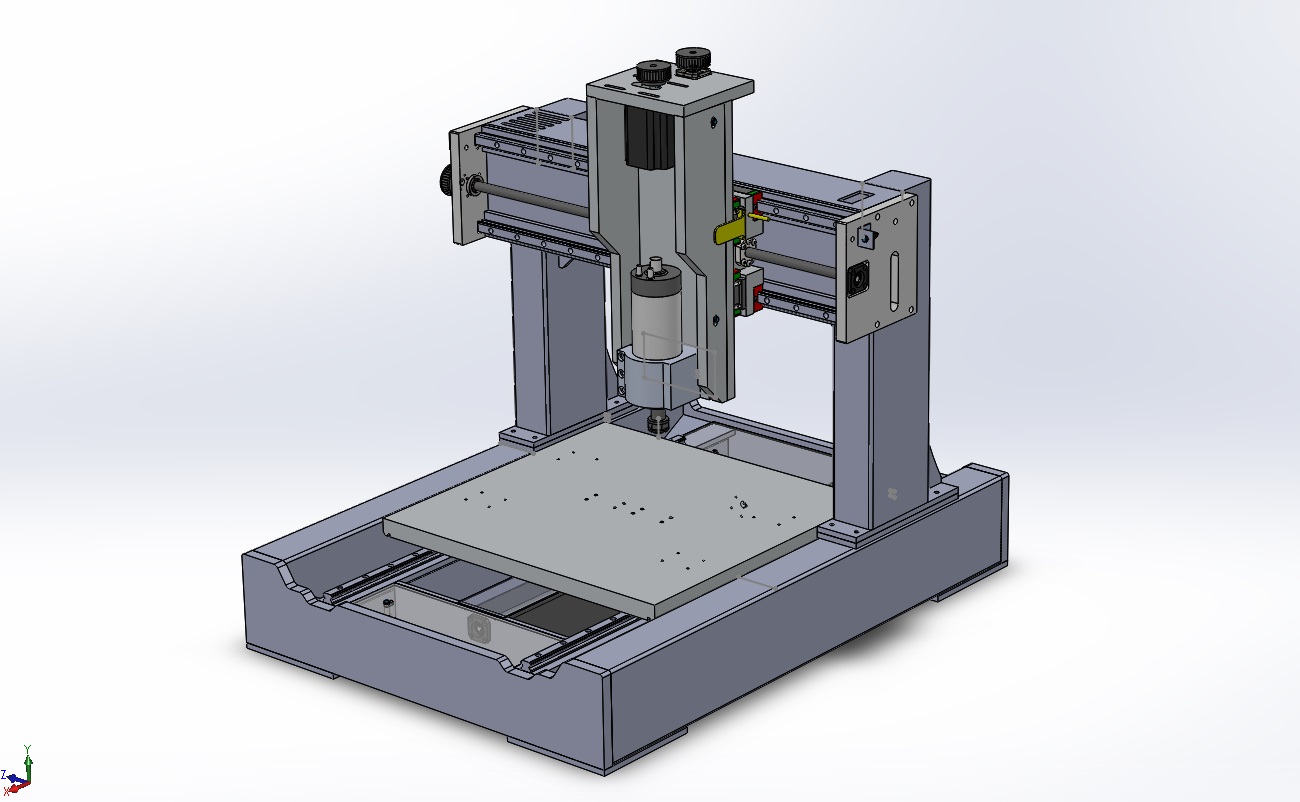
Wieczorem trochę przemyślałem sprawę umiejscowienia czujników indukcyjnych i o ile w osi X i Y nie miałem żadnego problemu, to w zetce jeszcze nie wiem jak rozwiązać ten problem dla najwyższego położenia osi = nie mam gdzie zamocować czujnika...
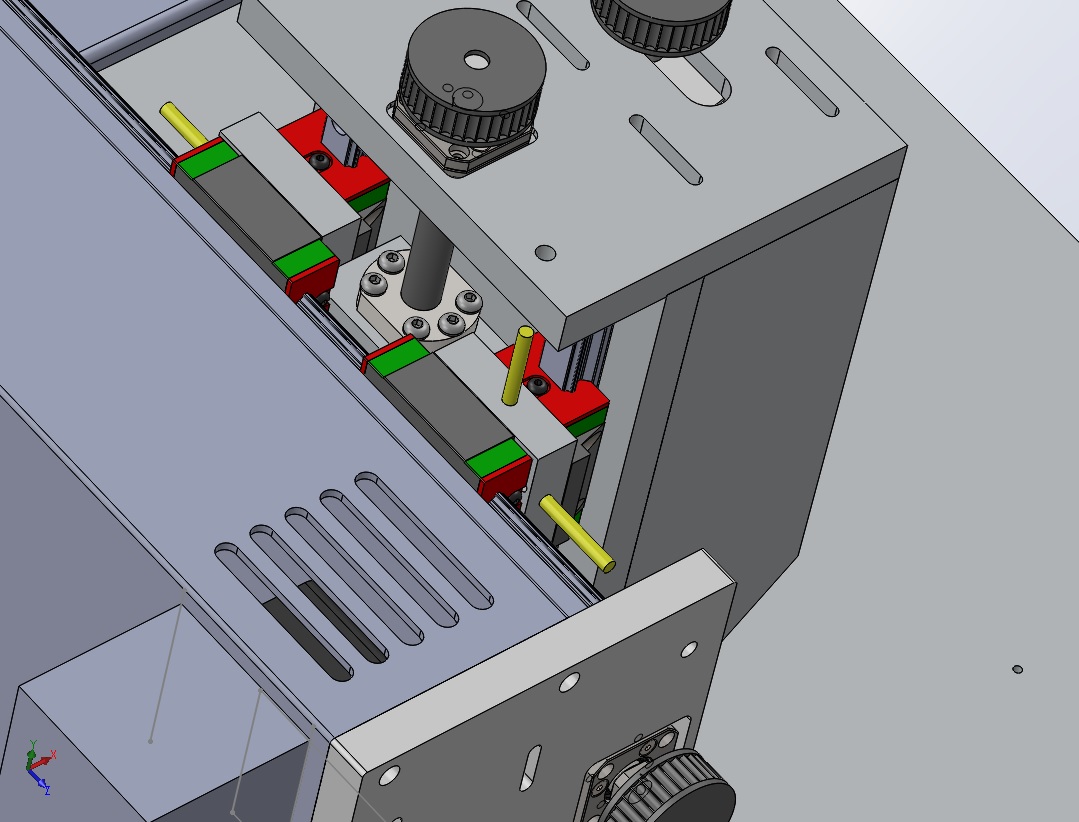
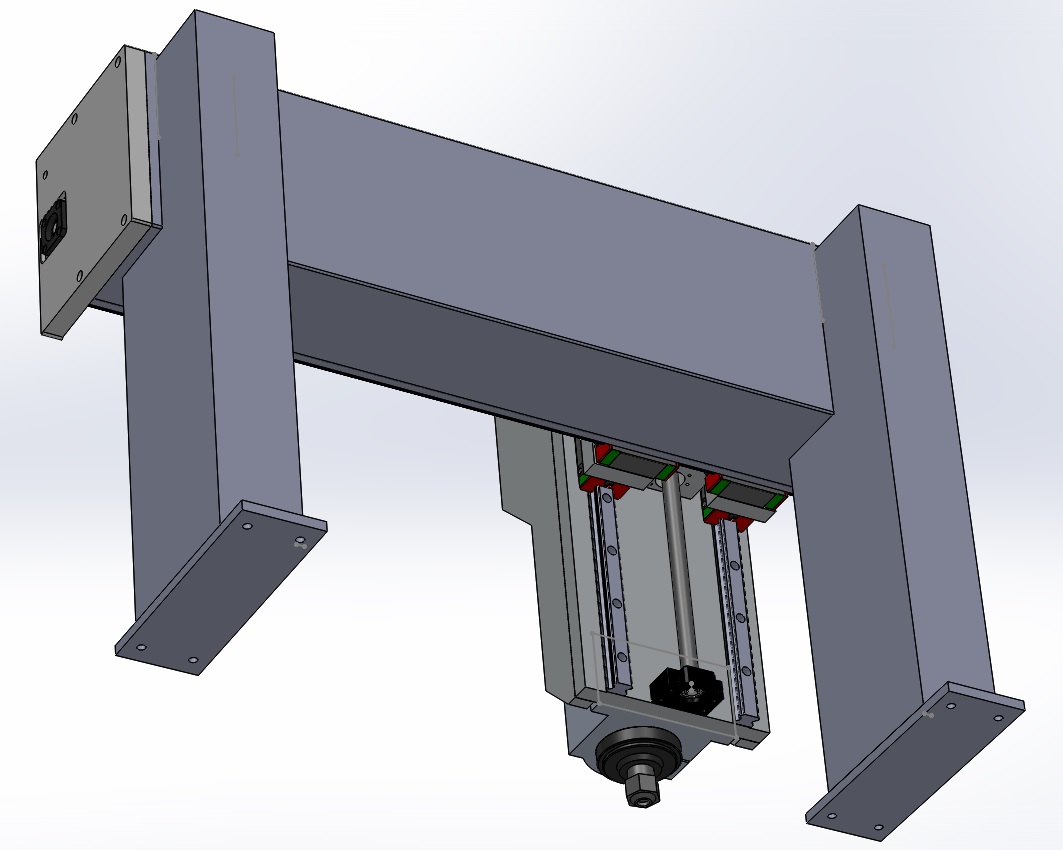
Poniżej kilka zrzutów ekranu żeby zobrazować problem.
Czujników jak na razie nie wrysowałem bo to w sumie pomijalny detal ale działało by to tak że żółty pręcik przejeżdża przez dziurkę, przy której na zewnątrz zamocowany jest czujnik:
Na X'ie zasada jest taka sama tyle że żółte pręciki wystają w dół pod blatem a czujnik jest zamocowany tak zeby patrzył w górę - w momencie zbliżenia sie pręcika czujnik się załącza
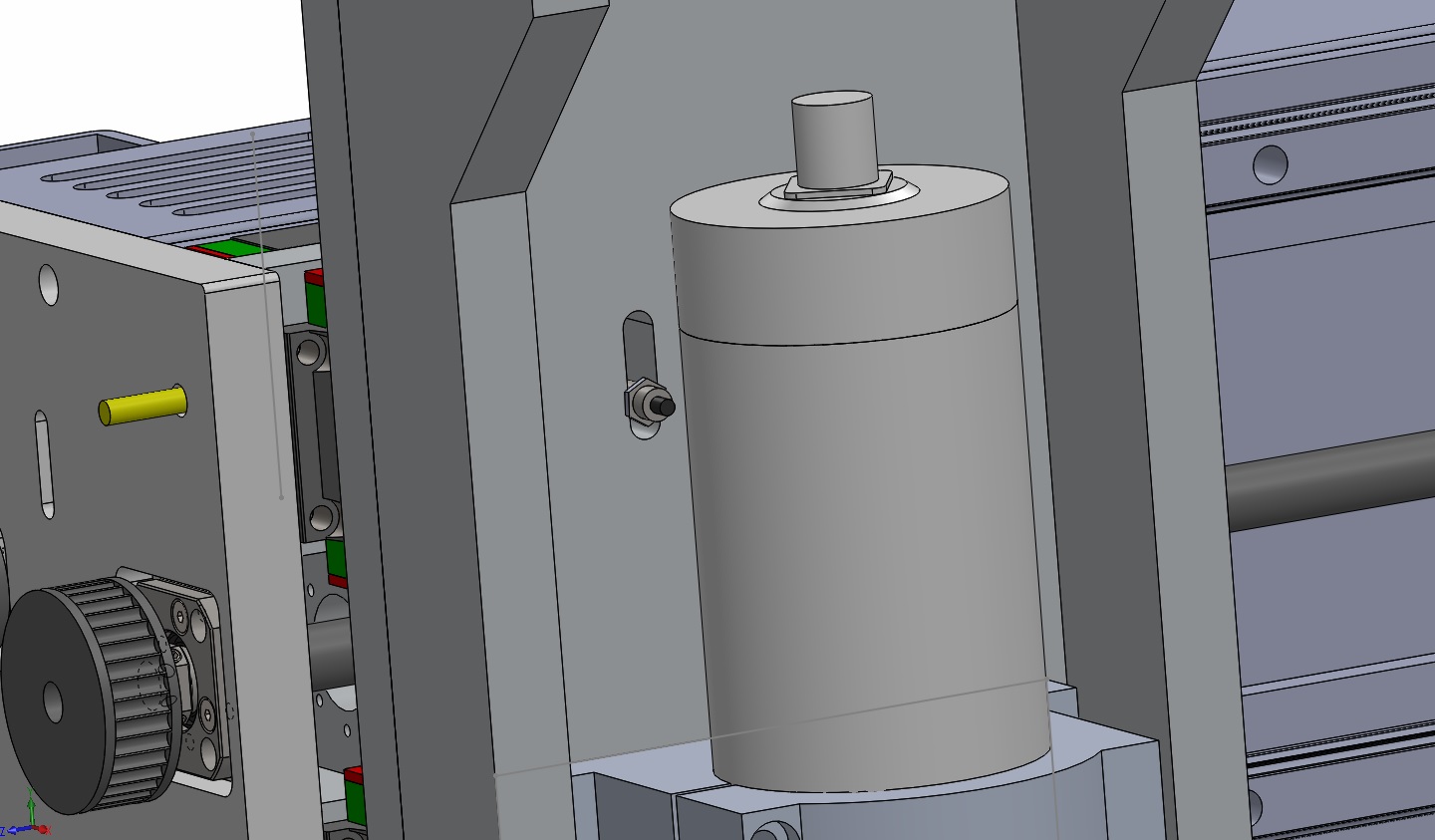
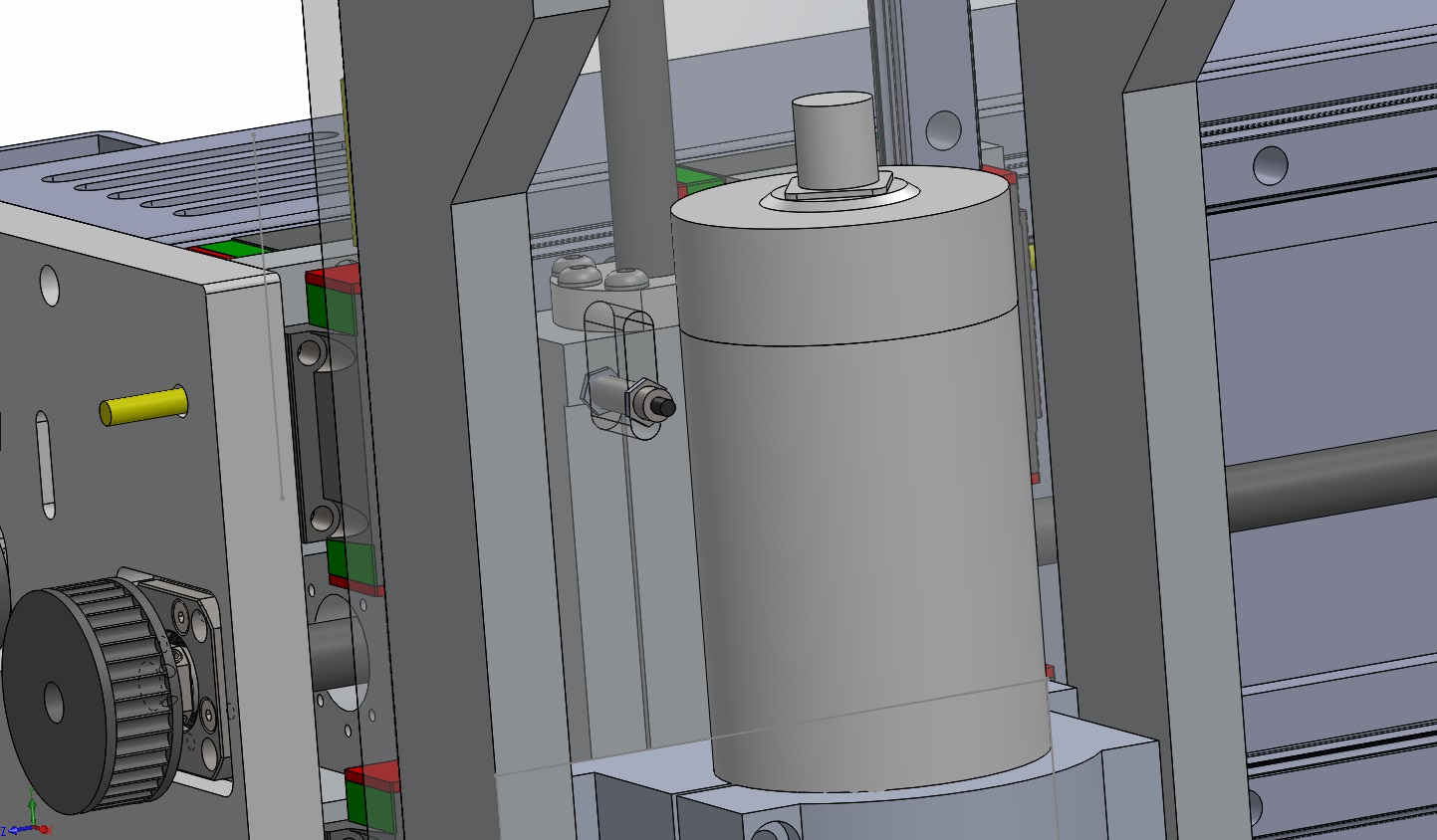
Jeszcze teraz przychodzi mi do głowy żeby od frontu krzyżaka nie dać jakiegoś rowka, a na głównej ścianie zetki na przelot czujnika.
W ten sposób, żeby przy osiągnięciu najwyższego położenia kończył się rowek i zaczynał wypust który załączył by czujnik, ale nie wiem czy wogóle gdzieś to tam zmieszczę...
EDIT: Coś na tej zasadzie:
Jak myślicie ma to ręce i nogi?




")
")






