Strona 1 z 2
konfiguracja automatycznej tokarki
: 13 cze 2018, 17:18
autor: enterzbigi
Witam
Na wstępie przepraszam jeśli podobne pytania pojawiły się już na forum, a ja nie potrafię ich znaleźć.
Chciałbym poprosić Was o pomoc przy konfigurowaniu LinuxCnc do obsługi obrotowej osi i dopisanie podprogramu do zmiany narzędzi. Tokarka fizycznie już jest zbudowana a ja nie potrafię skonfigurować softu nawet dodanie osi A stwarza mi problemy. Od czego zacząć? A może poratuje ktoś gotowymi ustawieniami z swojej tokarki?
Re: konfiguracja automatycznej tokarki
: 14 cze 2018, 21:53
autor: adam Fx
Taka konfiguracja o jakiej piszesz jest że tak powiem ponadpodstawowa czyli wykracza poza możliwości kreatora i w dużym stopniu zależy od rozwiązań technicznych jakie zastosowały swojej maszynie na przykład wspominasz na osi obrotowej A chociaż nie wiem czy nie masz na myśli C czyli tak zwanego indeksowanego wrzeciona w takim wypadku można to rozwiązać na wiele sposobów widziałem rozwiązania których napędu ze zwykłego silnika a podział kontowy poprzez przekładnie sprzęga no z wrzecionem Ale było też rozwiązanie że silnik który napędza Wrzeciono był Servo To samo tyczy się magazynu narzędzi również znaczenie ma sterowanie w jakie wyposażyłeś maszynę
Reasumując musisz podać więcej szczegółów najlepiej też trochę zdjęć napisz też cię w ogóle Udało się uruchomić maszynę działają podstawowe funkcje jak jeżdżenie osiami trzymanie wymiaru krańcówki Home ewentualnie enkoder wrzeciona Jeśli masz wyposażony sterowanie obrotami. itd
Re: konfiguracja automatycznej tokarki
: 15 cze 2018, 09:43
autor: senio
enterzbigi pisze: ↑13 cze 2018, 17:18
Chciałbym poprosić Was o pomoc przy konfigurowaniu LinuxCnc do obsługi obrotowej osi i dopisanie podprogramu do zmiany narzędzi.
Odnośnie 3 osi zrobiłeś imak obrotowy jako 3 os tak ? W Stepconfigu nie dodasz 3 osi tokarki. Trzeba to zrobić ręcznie w plikach ini oraz hal
W Ini dodaj w sekcjach. Oczywiście parametry swojej maszyny wstaw.
Kod: Zaznacz cały
[DISPLAY]
GEOMETRY = XZC
[TRAJ
COORDINATES = X Z C
[AXIS_5]
TYPE = ANGULAR
HOME = 0.0
MAX_VELOCITY = 250.0
MAX_ACCELERATION = 800.0
STEPGEN_MAXACCEL = 1000.0
SCALE = 33.333333333
FERROR = 1
MIN_FERROR = .25
#MIN_LIMIT = -9999.0
#MAX_LIMIT = 9999.0
HOME_OFFSET = 0.0
HOME_SEQUENCE = 0
SEARCH_VEL = 0
LATCH_VEL = 0
USE_INDEX = NO
HOME_SEQUENCE = 0
Hal u mnie z osią C
Kod: Zaznacz cały
# Generated by stepconf 1.1 at Wed Feb 18 18:38:15 2015
# Jeśli zmodyfikujesz ten plik zmainy zostaną
# nadpisane gdy uruchomisz ponownie Stepconf
loadrt trivkins
loadrt [EMCMOT]EMCMOT base_period_nsec=[EMCMOT]BASE_PERIOD servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[TRAJ]AXES
loadrt hal_parport cfg="0x378 out"
setp parport.0.reset-time 5000
loadrt stepgen step_type=0,0,0
loadrt encoder num_chan=1
loadrt pwmgen output_type=1
addf parport.0.read base-thread
addf stepgen.make-pulses base-thread
addf encoder.update-counters base-thread
addf pwmgen.make-pulses base-thread
addf parport.0.write base-thread
addf parport.0.reset base-thread
addf stepgen.capture-position servo-thread
addf encoder.capture-position servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf stepgen.update-freq servo-thread
addf pwmgen.update servo-thread
net spindle-cmd <= motion.spindle-speed-out => pwmgen.0.value
net spindle-on <= motion.spindle-on => pwmgen.0.enable
net spindle-pwm <= pwmgen.0.pwm
setp pwmgen.0.pwm-freq 100.0
setp pwmgen.0.scale 1166.66666667
setp pwmgen.0.offset 0.114285714286
setp pwmgen.0.dither-pwm true
net spindle-at-speed => motion.spindle-at-speed
net spindle-cw <= motion.spindle-forward
setp encoder.0.position-scale 144.000000
net spindle-position encoder.0.position => motion.spindle-revs
net spindle-velocity encoder.0.velocity => motion.spindle-speed-in
net spindle-index-enable encoder.0.index-enable <=> motion.spindle-index-enable
net spindle-phase-a encoder.0.phase-A
net spindle-phase-b encoder.0.phase-B
net spindle-index encoder.0.phase-Z
net xstep => parport.0.pin-02-out
setp parport.0.pin-02-out-reset 1
net xdir => parport.0.pin-03-out
setp parport.0.pin-03-out-invert 1
net zstep => parport.0.pin-06-out
setp parport.0.pin-06-out-reset 1
net zdir => parport.0.pin-07-out
setp parport.0.pin-07-out-invert 1
net cstep => parport.0.pin-04-out
setp parport.0.pin-04-out-reset 1
net cdir => parport.0.pin-05-out
setp parport.0.pin-05-out-invert 1
setp stepgen.0.position-scale [AXIS_0]SCALE
setp stepgen.0.steplen 1
setp stepgen.0.stepspace 0
setp stepgen.0.dirhold 60000
setp stepgen.0.dirsetup 60000
setp stepgen.0.maxaccel [AXIS_0]STEPGEN_MAXACCEL
net xpos-cmd axis.0.motor-pos-cmd => stepgen.0.position-cmd
net xpos-fb stepgen.0.position-fb => axis.0.motor-pos-fb
net xstep <= stepgen.0.step
net xdir <= stepgen.0.dir
net xenable axis.0.amp-enable-out => stepgen.0.enable
setp stepgen.1.position-scale [AXIS_2]SCALE
setp stepgen.1.steplen 1
setp stepgen.1.stepspace 0
setp stepgen.1.dirhold 60000
setp stepgen.1.dirsetup 60000
setp stepgen.1.maxaccel [AXIS_2]STEPGEN_MAXACCEL
net zpos-cmd axis.2.motor-pos-cmd => stepgen.1.position-cmd
net zpos-fb stepgen.1.position-fb => axis.2.motor-pos-fb
net zstep <= stepgen.1.step
net zdir <= stepgen.1.dir
net zenable axis.2.amp-enable-out => stepgen.1.enable
setp stepgen.2.position-scale [AXIS_5]SCALE
setp stepgen.2.steplen 1
setp stepgen.2.stepspace 0
setp stepgen.2.dirhold 35000
setp stepgen.2.dirsetup 35000
setp stepgen.2.maxaccel [AXIS_5]STEPGEN_MAXACCEL
net cpos-cmd axis.5.motor-pos-cmd => stepgen.2.position-cmd
net cpos-fb stepgen.2.position-fb => axis.5.motor-pos-fb
net cstep <= stepgen.2.step
net cdir <= stepgen.2.dir
net cenable axis.5.amp-enable-out => stepgen.2.enable
net estop-out <= iocontrol.0.user-enable-out
net estop-out => iocontrol.0.emc-enable-in
loadusr -W hal_manualtoolchange
net tool-change iocontrol.0.tool-change => hal_manualtoolchange.change
net tool-changed iocontrol.0.tool-changed <= hal_manualtoolchange.changed
net tool-number iocontrol.0.tool-prep-number => hal_manualtoolchange.number
net tool-prepare-loopback iocontrol.0.tool-prepare => iocontrol.0.tool-prepared
Re: konfiguracja automatycznej tokarki
: 15 cze 2018, 20:07
autor: enterzbigi
Witam ponownie
Dziękuję za zainteresowanie tematem, dziś mogę trochę więcej napisać.
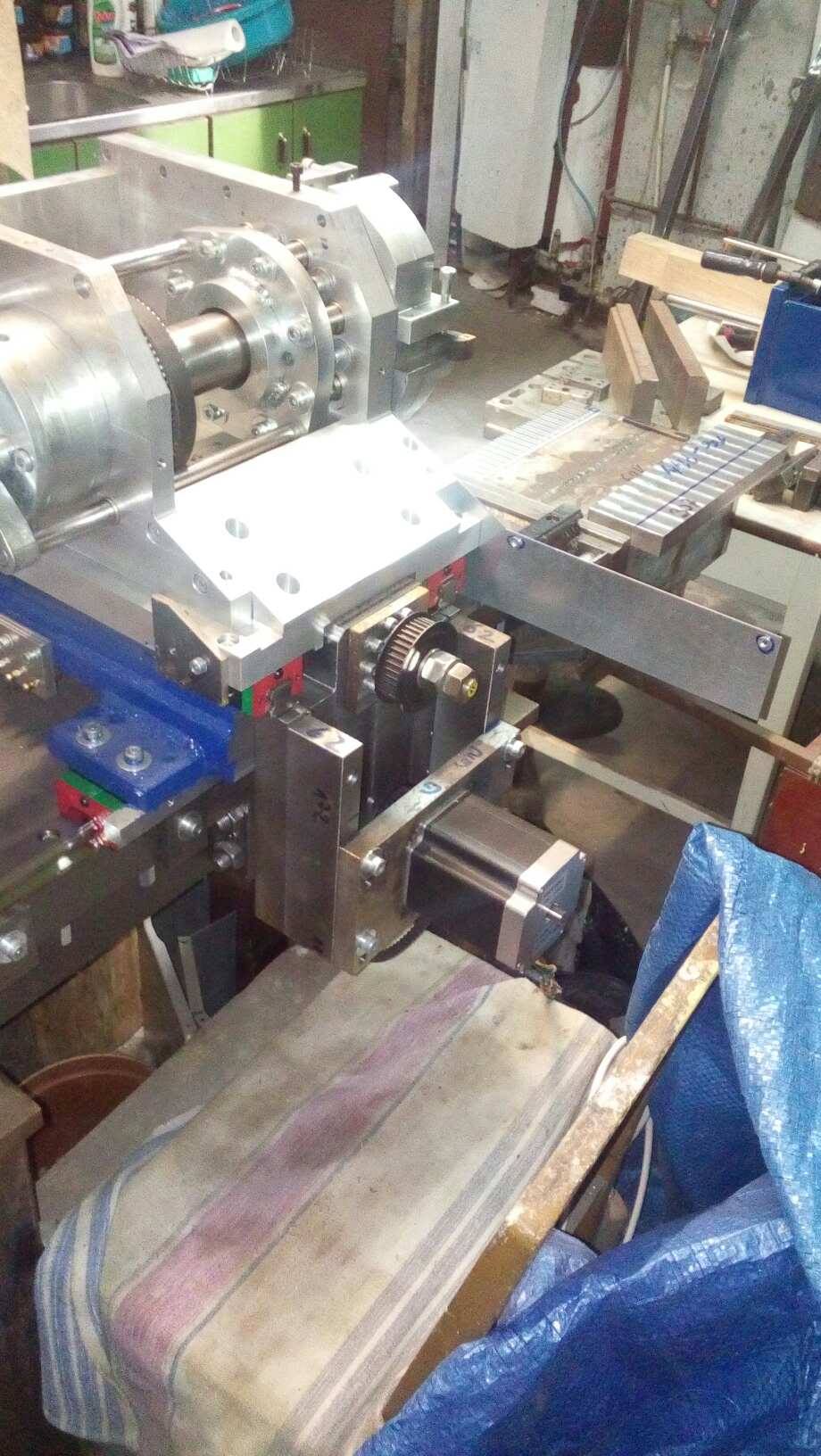
Mój tato - emeryt zainspirowany "rewolwerówką" Kamara rozpoczął robić taką konstrukcję gdy Kamar skończył. Z racji nikłych funduszy budowa w trybie hobbystycznym trwała 3 lata większość elementów tato robił sam głównie na frezarce DIY zbudowanej również zainspirowany tym forum.
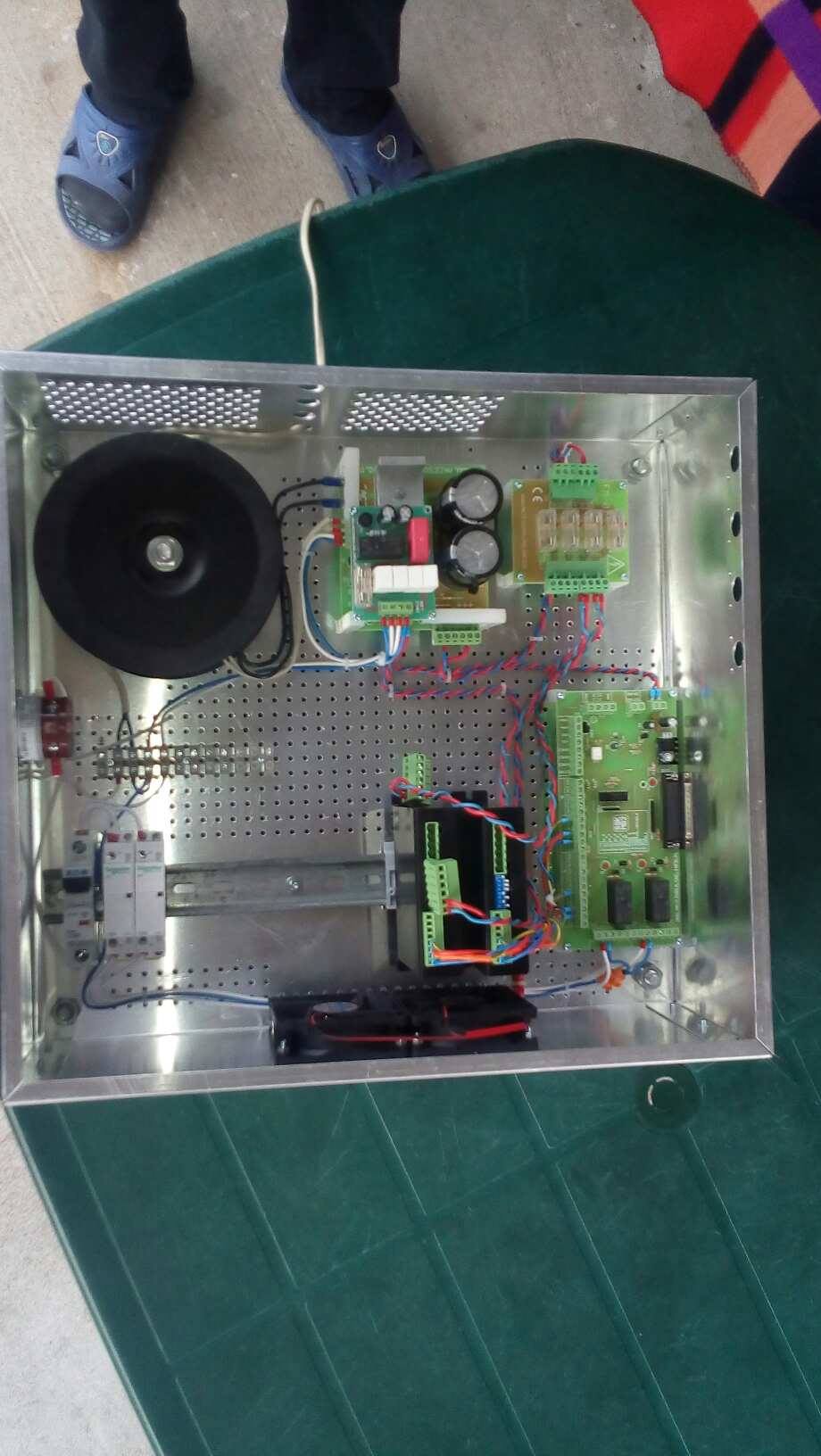
Tokarka jak na razie ma w działające posuwy X Z wrzeciono będzie napędzane z silnika z falownikiem z tarczą jako enkoder (taki plan serwo za drogie)
Głowica rewolwerowa napędzana silnikiem krokowym blokowana siłownikiem pneumatycznym



Re: konfiguracja automatycznej tokarki
: 15 cze 2018, 21:07
autor: senio
@enterzbigi
Czyli tak jak napisałem. Moja trzecia oś dodana jest na podstawie plików ini i hal rewolwerówki Kamara. Też to z jego plików podglądałem i zrobiłem u siebie. A jak dodasz juz oś C i będzie latała to pukaj do Kamara o resztę obsługi tego imaka.
Re: konfiguracja automatycznej tokarki
: 18 cze 2018, 20:01
autor: enterzbigi
Debug file information:
.
./tokarka.hal:91: Pin 'axis.5.motor-pos-cmd' does not exist
Taki oto komunikat mam po uzupełnieniu ini tokarki i skopiowaniu hal
Zainstalowałem Debiana Wheezy z linuxCNC 2.7.13
(Mogę poprosić o przypomnienie jak wstawia się kod do posta

Do tego jak stworzyłem nowy domyślny config w stepconf to sam się wywala ;/
Re: konfiguracja automatycznej tokarki
: 18 cze 2018, 20:59
autor: senio
Ty nie masz skopiować do siebie, tego co wkleiłem z mojej maszyny. To jest tylko dla podglądu. Porównaj pliki hal Twój i mój. Czego nie masz odnośnie osi C dodaj w swoim pliku hal wzorując się na tym wklejonym przykładzie.
Re: konfiguracja automatycznej tokarki
: 22 lip 2018, 08:35
autor: enterzbigi
Witam po małej przerwie.
Po małych problemach mam stworzoną oś A . Tak jak pisał Senio należy stworzyć własną i dodać brakującą oś .Jak ktoś jest zainteresowany mogę wstawić moje konfiguracje ale tylko do podglądu tak jak pisał Senio .A teraz mam prośbę do kolegi Kamara jak zrobić blokadę i zabezpieczenie , morze kolega podpowie jak to stworzyć .Mam podłączony rozdzielacz powietrzny i siłownik blokuje tylko jak to podłączyć do komputera i programu będę wdzięczny .
Re: konfiguracja automatycznej tokarki
: 22 lip 2018, 09:38
autor: adam Fx
blokadę możesz aktywować własna funkcją M
taką funkcje można dopisać dla linuxCNC
http://linuxcnc.org/docs/html/gcode/m-c ... :m100-m199
mój M kod
Kod: Zaznacz cały
#!/bin/sh
halcmd setp parport.1.pin-04-out False
exit 0
oznacza- ustaw PIN 4 na (drugim porcie LPT - bo pierwszy ma nr 0) w stan Fałsz czyli logiczne 0 i to np. wyłącza nam przekaźnik na tym własnie pinie
Re: konfiguracja automatycznej tokarki
: 22 lip 2018, 18:30
autor: enterzbigi
Sterowanie blokadą funkcją m działa prawidłowo wykorzystaliśmy wyjscie na przekaźnik m7 i m8
Chodzi nam o zrobienie czegos jako watchdog w linuxcnc który sprawdzałby poprawność pracy blokady. Sygnał zamkniecia blokady uzyskamy z krancówki gdyby cos nawaliło program pauzował by i jakiś alarm uruchomił.