Strona 1 z 5
Głowica rewolwerowa VDI :) komponent
: 24 sty 2015, 14:23
autor: tschaya
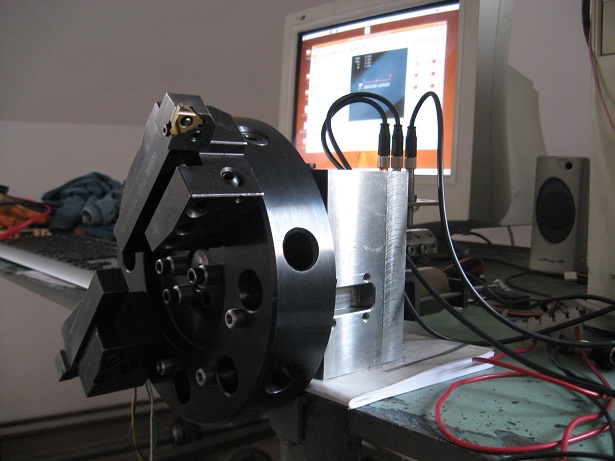
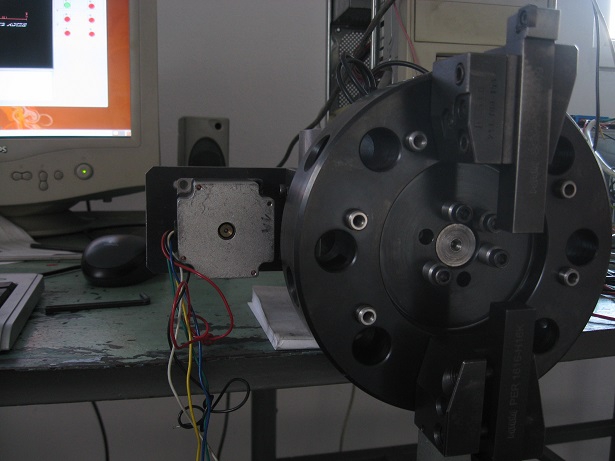
Zrobiłem głowicę rewolwerową do tokarki. Zbudowana jest na silniku krokowym a za enkoder (numer gniazda) robią trzy czujniki (ich wartości to 1, 2 i 4). Zaadaptowałem komponent z forum linuxa (posklejałem z kilku) i w zasadzie wszystko działa, ale jest jedno ale: kiedy zmieniam narzędzie po raz pierwszy - podaje komendę np. M6 T3, to muszę podać ten numer narzędzia/gniazda, w którym aktualnie głowica się znajduje (czyli w tym przypadku 3). Trochę tego nie rozumiem, bo przecież program najpierw odczytuje aktualny nr narzędzia i porównuje go z zadanym. Jeśli wpisze 'błędny' numer - to zachowuje się dziwnie: obraca o jeden więcej w prawo i o jeden za mało w lewo - czyli nie jest w stanie znaleźć prawidłowej pozycji.
Mój system to 8.04 i LinuxCNC 2.5.4
I tu pytanie do Kolegów - czy za pierwszym razem tak już musi być czy coś mam popieprzone w komponencie lub gdzie indziej

?
]
: 24 sty 2015, 16:27
autor: kamar
Troche to każesz wróżyć z fusów. To jest oś obrotowa ? Skąd krokowiec ma wiedzieć gdzie jest przy starcie ?
: 24 sty 2015, 18:05
autor: 251mz
kamar pisze:Skąd krokowiec ma wiedzieć gdzie jest przy starcie ?
tschaya pisze:a za enkoder (numer gniazda) robią trzy czujniki (ich wartości to 1, 2 i 4)
Jak mniemam kolega zrobił sobie enkoder 3 bitowy na czujnikach indukcyjnych czyli ma 8 pozycji...
: 24 sty 2015, 18:14
autor: kamar
251mz pisze:
Jak mniemam kolega zrobił sobie enkoder 3 bitowy na czujnikach indukcyjnych czyli ma 8 pozycji...
Jesli nawet to nie absolutny

: 24 sty 2015, 22:09
autor: adam Fx
kamar pisze:Jesli nawet to nie absolutny
jeżeli dobrze rozumiem zasadę działania takiego enkodera to ona zawsze wie po włączeniu w jakiej jest pozycji i tu powinno być tak samo gdyż np.
T1 = sygnał z czujnika 1 prawda z 2 i 3 fałsz T2= sygnał z czujnika 1 prawda z 2 prawda z 3 fałsz itd. czyli każde narzędzie ma tylko jedna kombinacje sygnałów. Teoretycznie powinno to działać.
Nawet jeśliby przy pierwszym wyborze nie sczytywał najpierw sygnału z czujników to prawidłowo powinien kręcić tak długo aż znajdzie właściwy a nie ustawiać inne narzędzie.
tschaya, byłoby fantastycznie jak byś bardziej rozwinął temat rewolweru od str. zarówno mech. jak i programowo elektronicznej (mało na naszym forum w tym temacie jest powiedziane)
: 24 sty 2015, 22:34
autor: tomcat65
Raczej absolutny.
Krokowiec nie musi nic wiedzieć, dane o położeniu zczytywane są z trzech czujników. Dwa stany razy trzy sztuki - 8 kombinacji.
0-0-0 ( T1 - pozycja 0 )
0-0-1 ( T2 - pozycja 1 )
0-1-0
...
1-1-1 ( T8 - pozycja 7 )
Gdzieś albo błąd w programie, albo coś źle wpisane.
: 25 sty 2015, 07:30
autor: kamar
Jak dla mnie to przekombinowane. Jak prosto wysłać krokowca na poz. 1.0.1 ? I co jeśli narzędzi opisanych w tabeli jest więcej niz osiem ? A jak będzie (a będzie
) potrzeba wlożyć narzędzie 3 w gniazdo 8 ?
: 25 sty 2015, 09:45
autor: lepi
To akurat proste. Kręcisz tak długo aż osiągniesz pozycję 1.0.1 a na podstawie bieżącej pozycji możesz nawet ustalić kierunek obrotu. Można też wyliczyć ile kroków ma wykonać silnik ale nie ma takiej potrzeby w tym przypadku.
: 25 sty 2015, 10:55
autor: kamar
lepi pisze:To akurat proste. Kręcisz tak długo aż osiągniesz pozycję 1.0.1 .
Faktycznie proste
Ruch glowicy musi być przewidywalny chyba ze bedzie za kazdym przerzutem wyjeżdzal na bazę.
: 25 sty 2015, 11:27
autor: 251mz
lepi,
Ogólnie to nawet krokowiec tam zbedny a mógłby być silnik DC na 2ch przekaźnikach;)
A od bidy to na jednym;)