



Witam serdecznie, poległem dzisiaj na uruchomieniu serwa. Możecie mi podpowiedzieć jak ma być skonfigurowany hal?
Głównie interesuje mnie jak wysterować poprawnie piny portu LPT, np:
pin-1 obrót w prawo,
pin-2 obrót w lewo,
pin-3 pwm.
Sygnałami z enkodera dałem rade, pomiar pozycji działa.
W tej chwili jak załączam "F2" napęd to wykonuje jeden obrót i wyrzuca alarm "błąd pozycji serwa" jak dobrze pamiętam.
W pierwszej kolejności chce sprawdzić ustawienia hala, mam wrażenie że jest źle skonfigurowany bo zawsze obraca sewem w tą sama stronę .
Pozdrawiam i Wesołych Świąt
uruchomienie i strojenie napędów


-
robalo
Autor tematu - Czytelnik forum poziom 1 (min. 10)
")
- Posty w temacie: 2
- Posty: 10
- Rejestracja: 08 paź 2014, 14:11
- Lokalizacja: Jędrzejów
Dzisiaj dalej walczyłem z tym napędem i jest mały sukces. Mogę załączyć sterowanie "F2" i nie wyświetla się od razu błąd "błąd pozycji w napędzie 0". W trybie ręcznym jak poruszam się osią do przodu jest nawet ok tylko jak poruszam się w drugą stronę to silnik szarpie.
Napisałem prosty program żeby oś cyklicznie zmieniała pozycję +/- 2mm, i na oscyloskopie zobaczyłem takie coś:
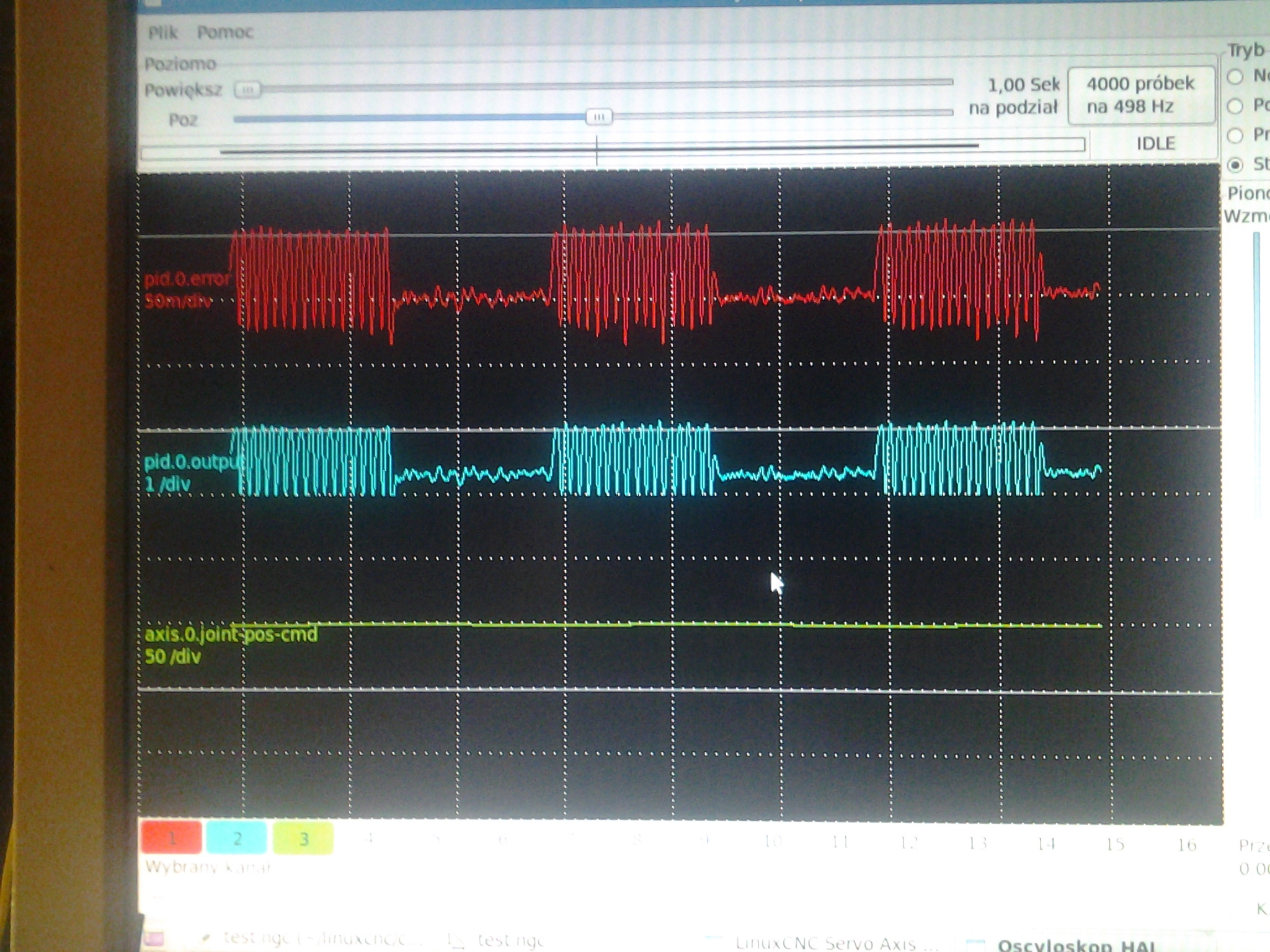
W miejscu gdzie są duże drgania, to sygnały sterujące kierunkiem silnika przełączają się miedzy sobą. Wydaję mi się że źle są skonfigurowane piny portu lpt. W załączniku jest plik HAL do sprawdzenia.
Mam do Was pytania:
Czy wyjścia cyfrowe hala są dobrze skonfigurowane,
Jak stroić regulator PID (najbardziej interesują mnie BIAS; FF0; FF1; FF2)?
Napisałem prosty program żeby oś cyklicznie zmieniała pozycję +/- 2mm, i na oscyloskopie zobaczyłem takie coś:
W miejscu gdzie są duże drgania, to sygnały sterujące kierunkiem silnika przełączają się miedzy sobą. Wydaję mi się że źle są skonfigurowane piny portu lpt. W załączniku jest plik HAL do sprawdzenia.
Mam do Was pytania:
Czy wyjścia cyfrowe hala są dobrze skonfigurowane,
Jak stroić regulator PID (najbardziej interesują mnie BIAS; FF0; FF1; FF2)?






