Serwokrokowiec czyli pluto-step-encoder.
: 19 sie 2013, 19:34
LinuxCNC umożliwia użycie silników krokowych w zamkniętej pętli z enkoderami.
Działa to trochę inaczej niż STEP/DIR, bardziej jak klasyczne serwo, bo silniki krokowe mają regulowaną jedynie prędkość a o położenie dbają enkodery.
Tak czy inaczej, tak zbudowany napęd da się w rozsądnych granicach przeciążyć bez ryzyka utraty kroków.
Użycie do sterowania takim napędem portu LPT raczej nie wchodzi w rachubę, bo przy rozsądnych prędkościach i rozdzielczościach enkoderów jest najzwyczajniej kilka razy za wolny.
Trzeba użyć dodatkowego układu, który przejmie na siebie zliczanie enkoderów i generowanie impulsów STEP dla silników.
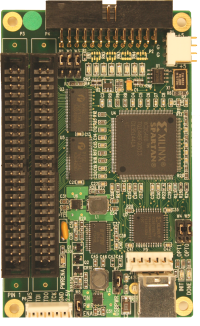
Najtańszym układem który się do tego nadaje jest Pluto-P .
Kosztuje pięćdziesiąt dolarów plus dziesięć dolarów wysyłka, czyli poniżej 200 zł.
Problem jest taki, że w tej chwili są dwa rodzaje firmware, jeden do serwosilników, czyli odczyt enkoderów i wysyłanie sygnału PWM, a drugi do obsługi silników krokowych, ale bez możliwości odczytu enkoderów.
Oczywiście użycie dwóch płytek Pluto-P jest ekonomicznie nieopłacalne, a żeby użyć jednej płytki do odczytu enkoderów i sygnałów STEP/DIR z LPT, trzeba by mieć dwa porty LPT, bo jeden zajmie Pluto-P.
Ale to też nie będzie dobrze, bo nie uzyskamy więcej niż jakieś 30 kHz impulsów STEP.
Najlepiej by było napisać nowy firmware, zawierający odczyt enkoderów i sterowanie krokowców.
Wczoraj napisałem na emc-developers i dostałem pozytywny odzew.
Teraz by się przydało zgromadzić jakąś grupę zainteresowanych, żeby trochę lobbować projekt ...
Wszelkie uwagi i sugestie mile widziane.
.
Działa to trochę inaczej niż STEP/DIR, bardziej jak klasyczne serwo, bo silniki krokowe mają regulowaną jedynie prędkość a o położenie dbają enkodery.
Tak czy inaczej, tak zbudowany napęd da się w rozsądnych granicach przeciążyć bez ryzyka utraty kroków.
Użycie do sterowania takim napędem portu LPT raczej nie wchodzi w rachubę, bo przy rozsądnych prędkościach i rozdzielczościach enkoderów jest najzwyczajniej kilka razy za wolny.
Trzeba użyć dodatkowego układu, który przejmie na siebie zliczanie enkoderów i generowanie impulsów STEP dla silników.
Najtańszym układem który się do tego nadaje jest Pluto-P .
Kosztuje pięćdziesiąt dolarów plus dziesięć dolarów wysyłka, czyli poniżej 200 zł.
Problem jest taki, że w tej chwili są dwa rodzaje firmware, jeden do serwosilników, czyli odczyt enkoderów i wysyłanie sygnału PWM, a drugi do obsługi silników krokowych, ale bez możliwości odczytu enkoderów.
Oczywiście użycie dwóch płytek Pluto-P jest ekonomicznie nieopłacalne, a żeby użyć jednej płytki do odczytu enkoderów i sygnałów STEP/DIR z LPT, trzeba by mieć dwa porty LPT, bo jeden zajmie Pluto-P.
Ale to też nie będzie dobrze, bo nie uzyskamy więcej niż jakieś 30 kHz impulsów STEP.
Najlepiej by było napisać nowy firmware, zawierający odczyt enkoderów i sterowanie krokowców.
Wczoraj napisałem na emc-developers i dostałem pozytywny odzew.
Teraz by się przydało zgromadzić jakąś grupę zainteresowanych, żeby trochę lobbować projekt ...
Wszelkie uwagi i sugestie mile widziane.
.