



")
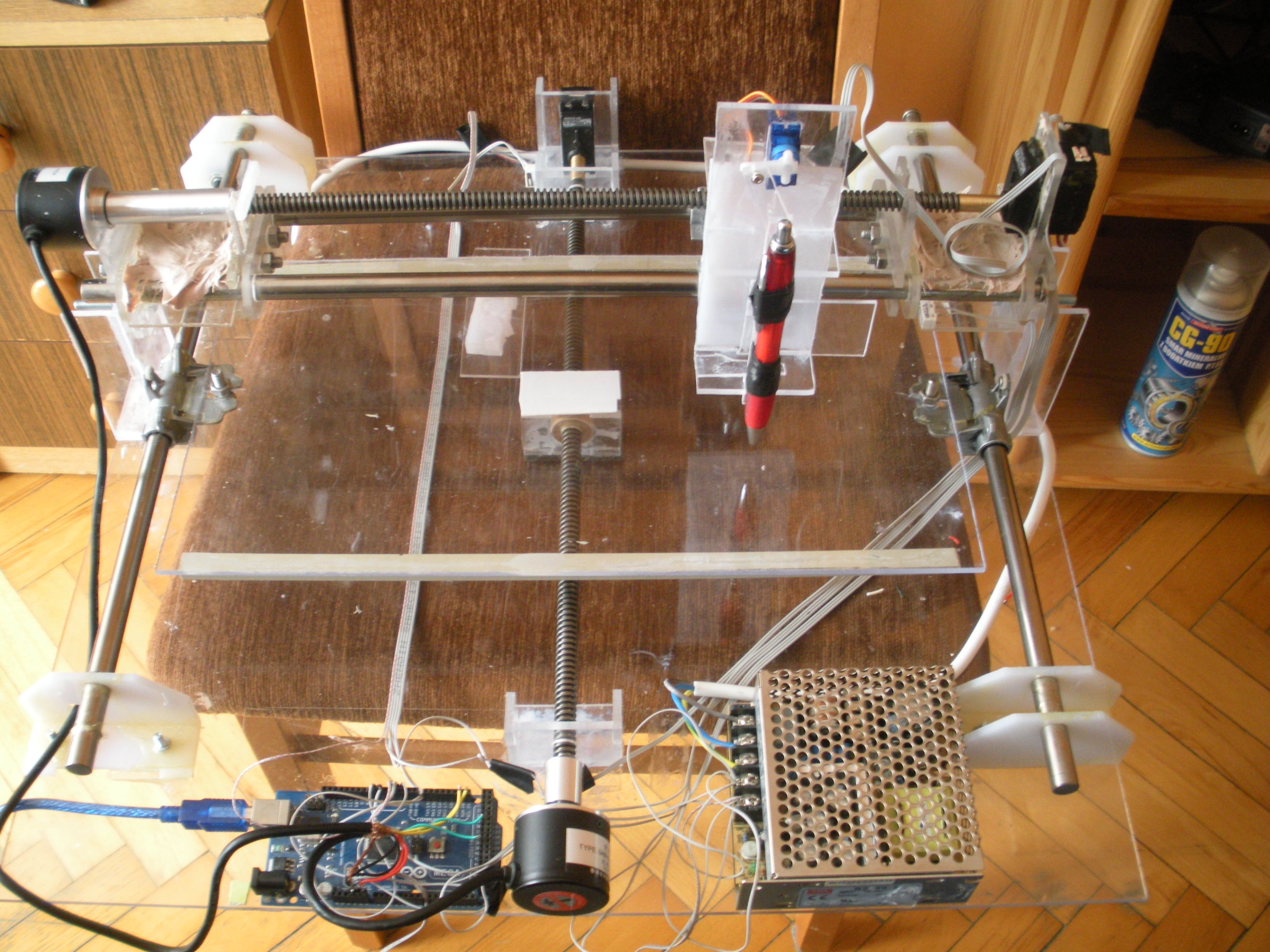
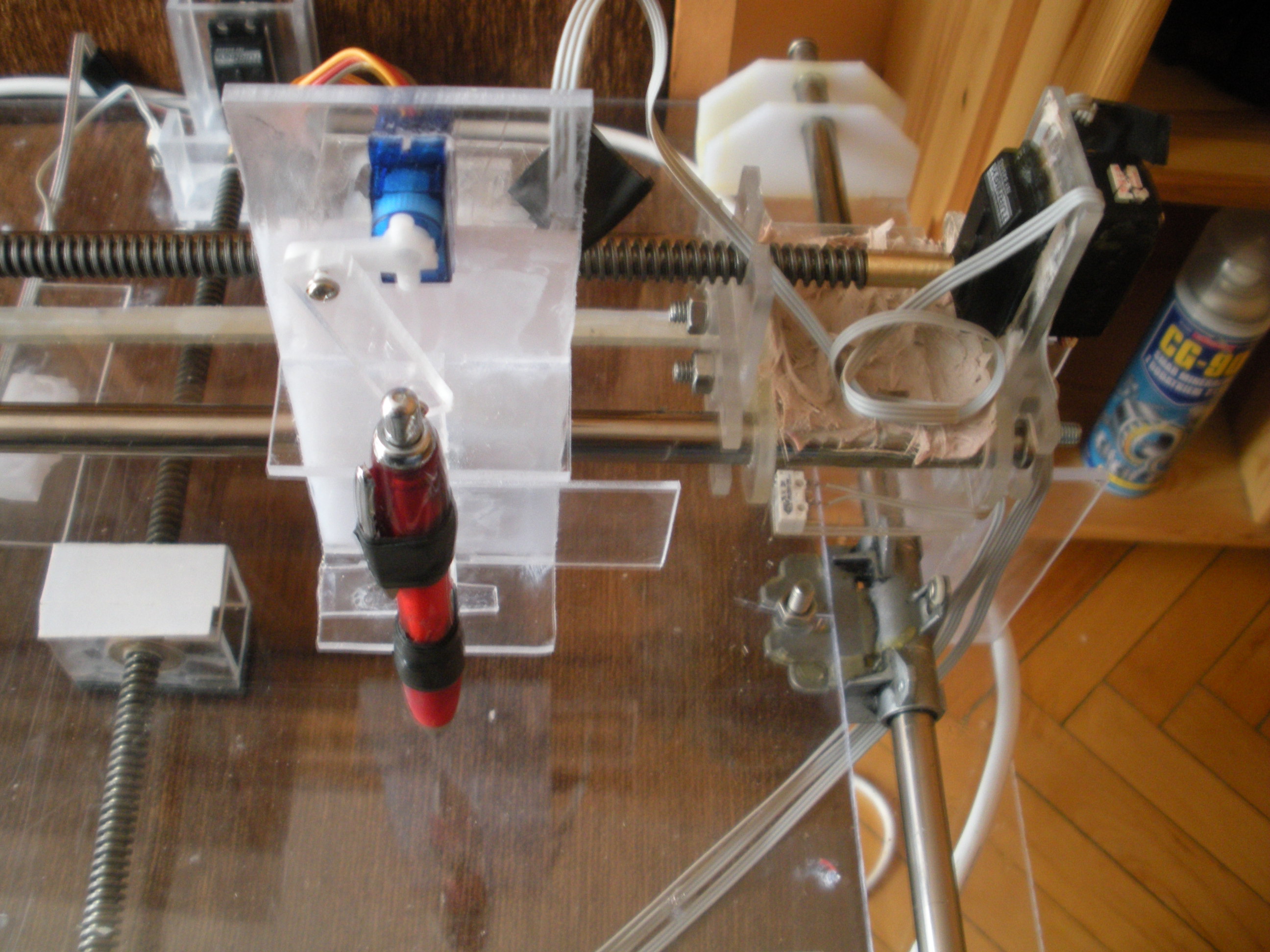
Wykorzystałem prowadnice z drukarek, śrubę trapezową, serwa modelarskie(6kg/cm), Encodery.
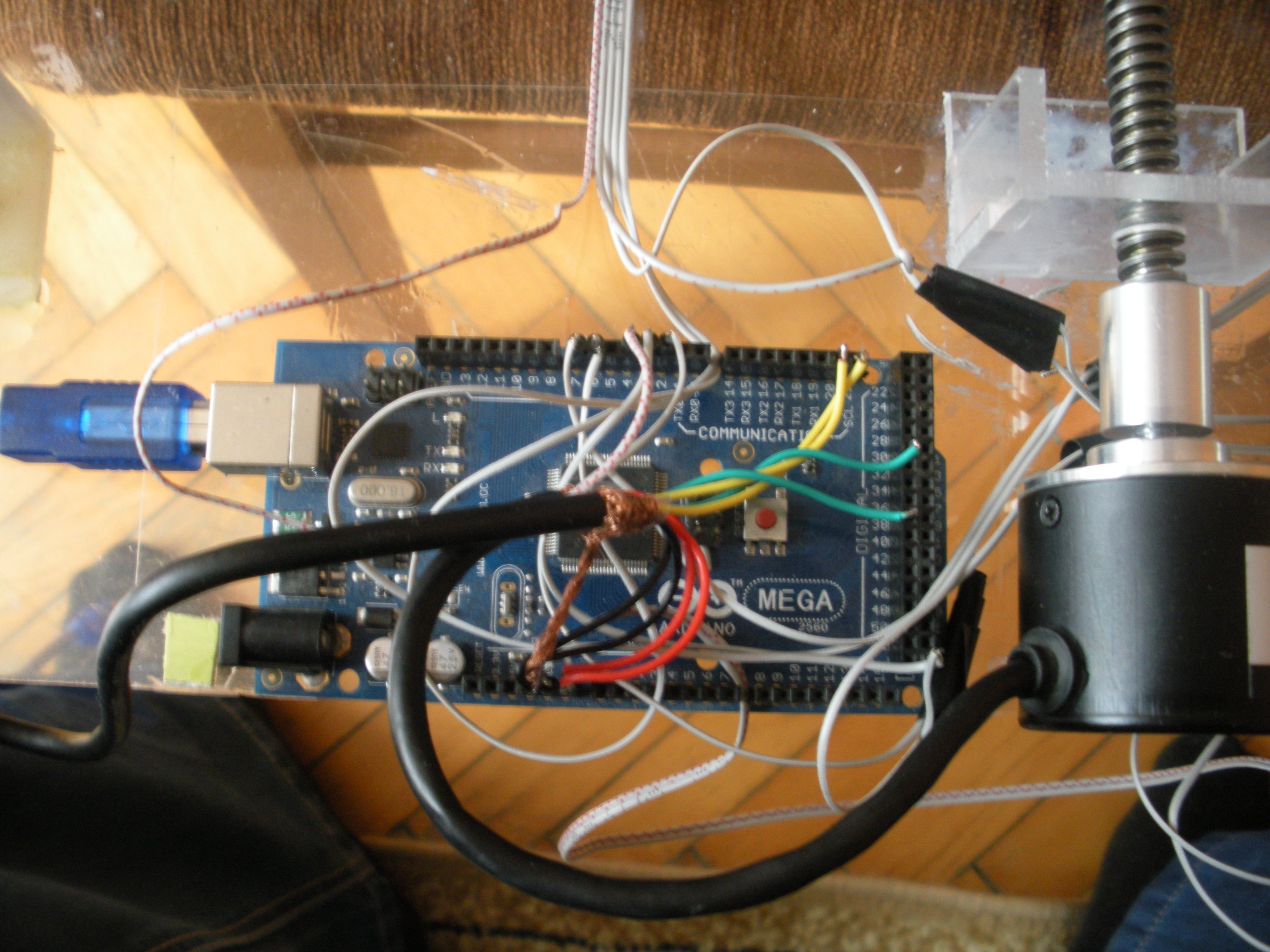
Jako elektronikę wykorzystałem Arduino Mega2560.
Wykonałem własne oprogramowanie na PC/Arduino do obsługi i realizacji G-Code(tylko pozycje bez poleceń specjalnych). Komunikacja odbywa się po porcie com(USB).
Program wczytuje G-Code i optymalizuje go by skrócić czas wykonania.
Encodery mają 400 impulsów na obrót(są na jednym przerwaniu co daje 800 pozycji na obrót).
Czyli teoretycznie dokładność to 0,005 milimetra.
Realna ok: 0,5 milimetra.
Jedno serwo mi się spaliło dlatego musiałem obniżyć, prosty błąd programu do jechało do końca, coś musiało pęknąć, jako ze nic się nie podało to zębatka padła a potem silnik(po wymieniałem, inny silnik już był lekko walnięty).
Planuje kupić 13Kg serwa z metalowymi zębatkami.
Zdjęcia:


Pierwszy rysunek zrobiony z encoderami anime:


Filmik:
[youtube][/youtube]
Pole robocze to mniej więcej 220x180mm, wystarczy na spore pcb.
Rysunek ma mnie więcej 80x80mm.






")











