Tak, ciągle mam nadzieję

Na razie to tylko koncepcja i chcę znać koszty przede wszystkim. Zrobiłem trochę dodatkowych obliczeń. Okazuje się, że będzie to nie tak jak do tej pory 250 lecz maksymalnie 170kg. Zwykle będzie to jednak około 145kg i mniej. Skok na każdym z boków zmniejszyłem do 1100mm. Czas przejścia przekątnej nie jest jednak istotny. Najważniejszym parametrem dla mnie jest przyspieszenie. Zależy mi na płynnej zmianie przyspieszenia od 0 do 3m/sek2. Zmiana taka powinna być na każdym z kierunków czyli na przekątnej wyjdzie 4,2m/sek2 max.
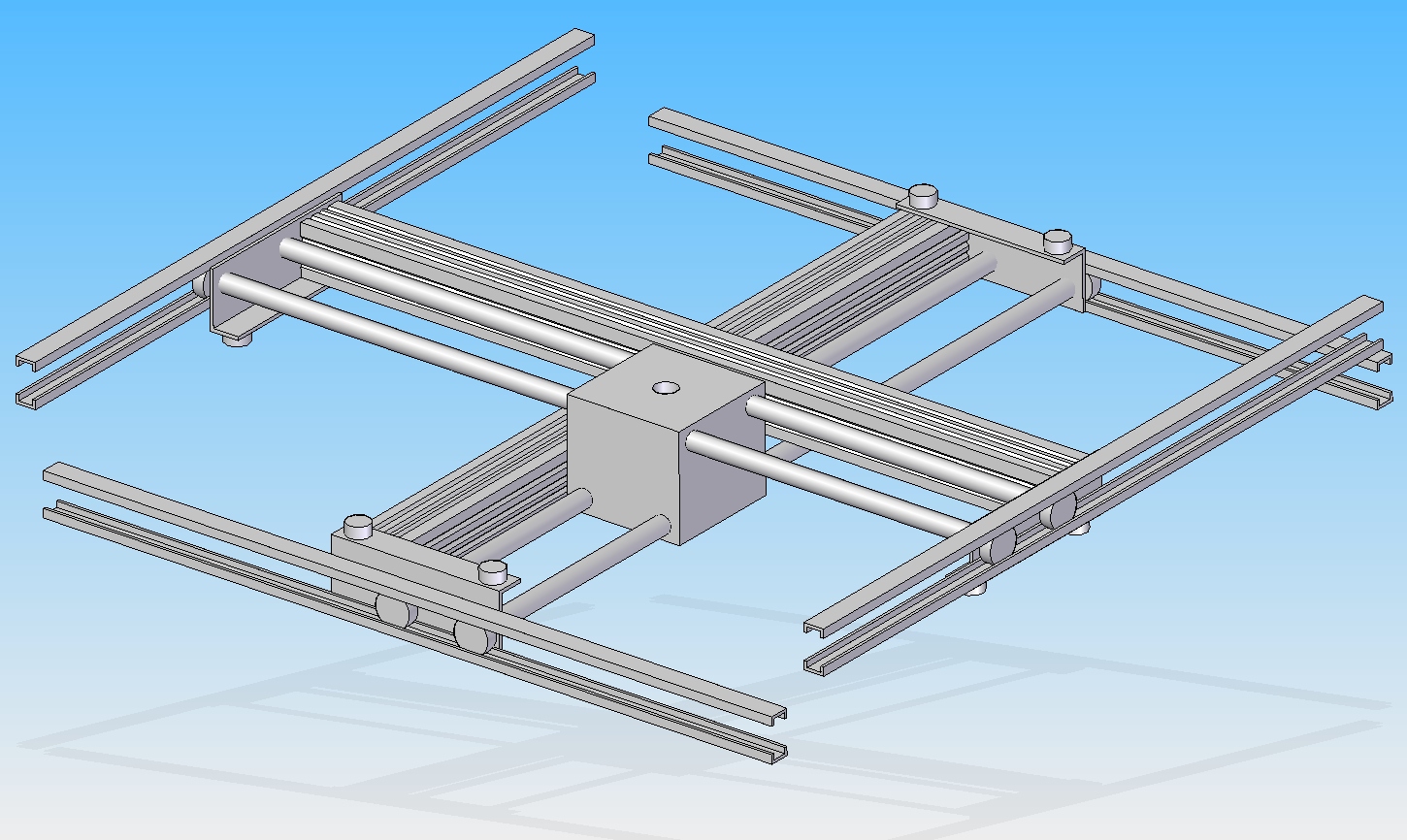
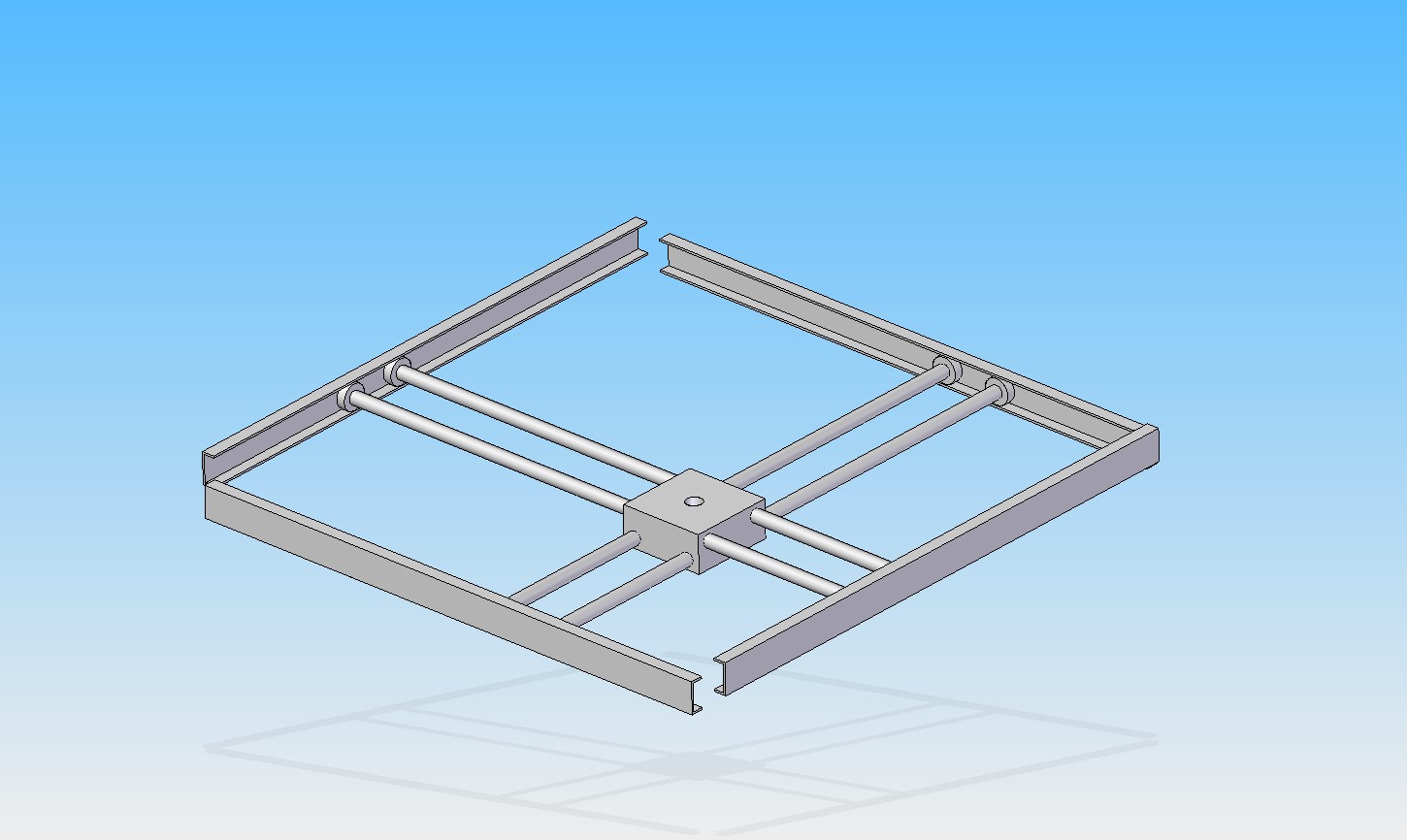
Postaram się opisać jak ma to działać:
Zwykle będzie startować z położenia centralnego, w dowolnym kierunku z przyspieszeniem 2÷2,5m/sek, przyspieszenie będzie płynnie zmniejszało się aż do wartości ujemnych i zatrzymywało się przy krańcu pola pracy.
Natomiast w przypadku startu z krańca pola w kierunku środka przyspieszenie początkowe może być około 2,5÷3m/sek2, płynnie zmniejsza się, maksymalna prędkość w środku danego kierunku i dalej zwalnianie.
Możliwe też będą starty z różnych miejsc w różnych kierunkach z różnymi przyspieszeniami z podanego zakresu.
Maksymalna możliwa prędkość w jednym kierunku to około 1,71m/sek w przypadku startu z boku i przelot na drugą stronę stołu. Zakładam, że połowa wyznaczonej drogi do przebycia będzie przyspieszanie z płynnym jego zmniejszaniem, dalej zwalnianie, tak by nie przekraczać tych około 3m/sek2.
Jednym z przenoszonych elementów jest człowiek, więc nie może być dużych przeciążeń. To że około 80÷90kg to człowiek to akurat dobrze, bo człowiek jako elastyczny element nie będzie tak obciążał konstrukcji przy nagłym lub awaryjnym zatrzymaniu.
Teraz już rozsądniej to wygląda?
[ Dodano: 2012-08-12, 12:45 ]
Weźmy pod uwagę pneumatykę i hydraulikę też.
Czyli to co potrzebuje teraz to siłownik o parametrach:
Maksymalna siła około 600÷700N
Maksymalne przyspieszenie ponad 3m/s2
Prędkość maksymalna około 1,8m/s
Skok minimum 1100mm
Precyzja, powtarzalność ok 3mm wystarczy
No i sterowanie do tego z płynną zmianą przyspieszenia.








")


")