Strona 1 z 1
Przekladnia slimakowa pod wymiar
: 16 mar 2016, 15:30
autor: seywind
Witam!
Poszukuje pomocy w zaprojektowaniu przekładni ślimakowej pod wymiar. Obliczenia które przeprowadzałem wg książek do PKMów dawały mi wymiary rzędu 10mm średnicy ślimaka i odległości osi rzędu 25 mm na tą górną przekładnie składającą się z ćwierci ślimacznicy i ślimaka. Jednak odległość od osi mocowania ślimacznicy do miejsca gdzie będzie ślimak to ok 200 mm (mogę nieznacznie regulować). Przełożenie na obu przekładniach (dolna i górna) ma wynosić 1:40. Pytałem ludzi od PKMów i mówili, że przy tych naprężeniach która tam mam, nie ma sensu liczyć tego z wytrzymałości, tylko wystarczy dobrać pod wymiar. Pytanie teraz jak to zrobić?

Dzięki z góry za pomoc
: 17 mar 2016, 13:03
autor: zibi
Wycinasz z blachy na laserze albo na drutówce wycinek ślimacznicy a ślimak (gwint modułowy) na tokarce robisz lub bierzesz śrubę z gwintem trapezowym M10x2 robisz mocowanie na silnik krokowy (lub jaki tam napędza) i dobierasz moduł koła do gwintu metrycznego i ilość zębów ślimacznicy do przełożenia jakie chcesz uzyskać.
PS. Robisz panel podążający za słońcem?
: 17 mar 2016, 17:38
autor: seywind
bardziej mi chodziło o obliczenia teoretyczne. Typu średnice podziałowe, średnice zębów, moduły, kąty opasania itp. Tylko zamiast obliczać z podanych momentów i prędkości, obliczyć na wymaganą odległośc osi uwarunkowaną montażowa.
Tak robie solar tracker

Policzyłem wg książki Leonida Kurmaza (obliczenia wg momentow i predkosci) i wyniki wyszły śmiesznie małe, dlatego obliczyłem jeszcze raz wg książki do PKM pana Mazanka pomijając obliczenia odległości osi, tylko zakładając ją odrazu. Wyniki wydają się sensowne. Myśle, że mogę się nimi podzielić jeśli ktoś chciałbym zweryfikować
Silniki krokowe dobrane, jeszcze dokończyć model choć już niewiele zostało.
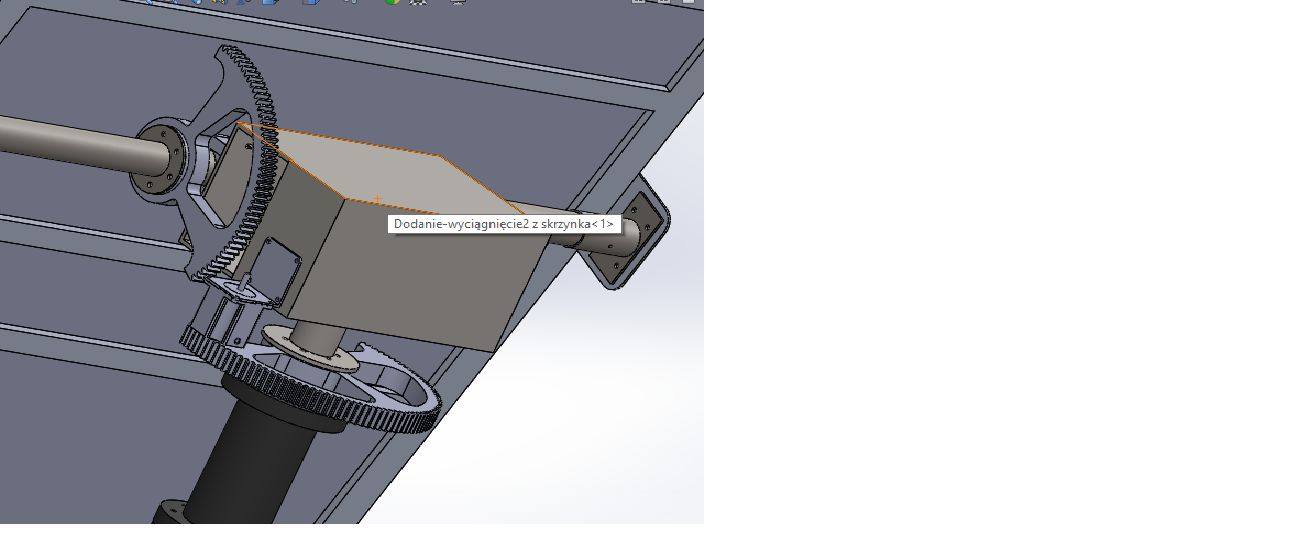
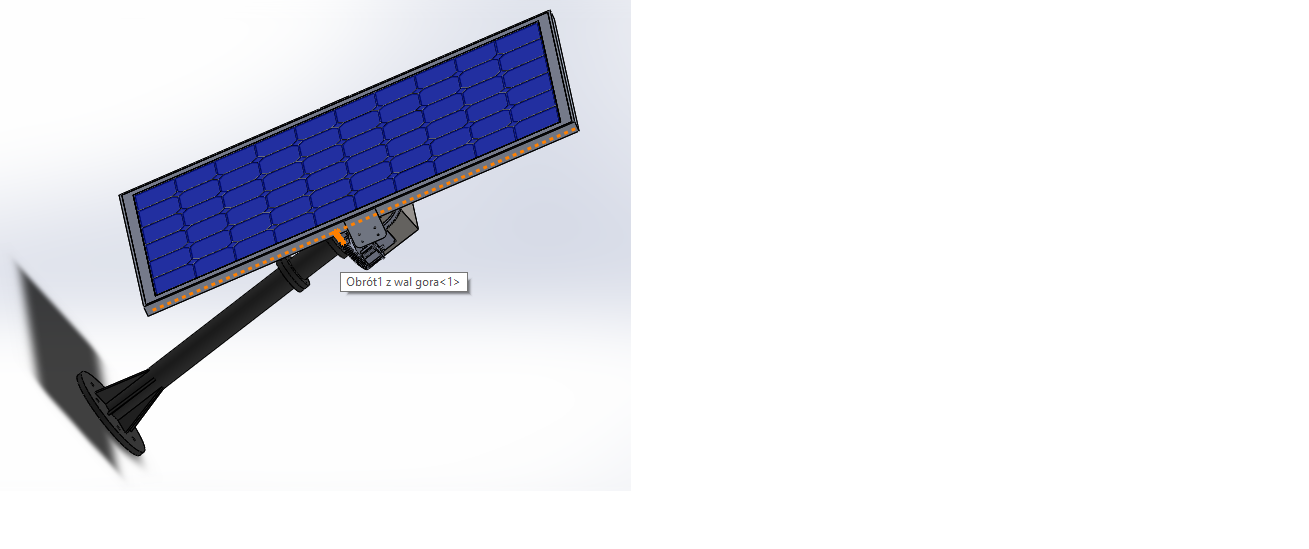
PS. Nie moge dodac rozszerzenia xlsx :/ i sorry za slabe screeny

: 19 mar 2016, 09:10
autor: Yarec
obliczenia mechaniki pomijam, ale mam pytanie czym/jak będzie sterowany Twój panel ?
: 21 mar 2016, 12:02
autor: seywind
dwa silniki krokowe NEMA24, sterowane atmega16. Różnica natężenia światła będzie mierzył układ różnicowy złożony z 4 fotorezystorów
: 27 mar 2016, 04:50
autor: Yarec
Witam saywind'a właśnie o to mi chodziło, bo wykorzystałem kiedyś gotową dokumentację (z NETu) ale nie na sterowniku 16bit a w technologi dyskretnej (jak znajdę na którymś dysku) to może prześlę w pliku PDF (były nawet wymiary i kąty rozchyłu rur czujnikowych). Może podaj link do Twego sterowania - chyba że to konstrukcja Autora.
: 27 mar 2016, 22:32
autor: seywind
jest to moja własna praca inzynierska, więc bez zgody uczelni nie mogę się chyba za bardzo dzielić nią. Spytam jak to wygląda i może coś wstawie. Rozwiazania są rozne. U mnie mikrokontroler atmega dziala jako generator czestotliwosciowy (przez pwm) i wlacza odpowiednie tryby pracy silnika krokowego. Za czujniki natezenia sluza pary fotorezystorów połączone w dzielniki napiecia, odzdzielone plytka o odpowiedniej wysokosci (decydowac bedzie o dokladnosci z zaleznosci trygonometrycznych)
: 28 mar 2016, 06:12
autor: Yarec
za cholerę nie mogę odszukać dokumentacji, u mnie były dwa silniki (z reduktorami planetarnymi [f-my MICRON...] CW/CCW) sterowane mostkami H (L/R - Down/Up), z pamięci : 4 fototranzystory umieszczone parami w rurach PVC Ø 32 D~200 (czernionych wewnętrznie) dawały sygnał na we. komparatorów porównawczych .
Jeśli jak mówisz jest to Twoja konstrukcja autorska to uczelnia jest tylko miejscem wykonania (chyba że masz umowę o zrzeczeniu się praw autorskich na rzecz w/w)