Strona 1 z 1
Arduino GRBL - ilość kroków / ob
: 27 lip 2018, 22:27
autor: jarod21
Witam,
Mam problem z obliczeniem ilości kroków na ob.
Sterownik NDC556 : ustawione pulse/rev 800
Silnik krokowy 1.9Nm 4.2A 1.8` - 200 imp/ob
Śruba TR18x4 - 4mm/ob
Program UGS 2.0.0 stable
Liczymy
200x8 = 1600 /4 = 400 imp/ob
po wpisaniu tej wartości i ustawieniu na g0 x1 o 1mm leci na 1,9mm
jak ustawie $100=1000
1mm to 4,75mm
więc 1mm to $100=210,5
Co źle liczę?? proszę o pomoc
Pozdrawiam Jarek
Re: Arduino GRBL - ilość kroków / ob
: 27 lip 2018, 22:56
autor: Darek05
Skąd te "8" silnik potrzebuje 50 impulsów żeby śruba przesunęła się o 1 mm i na sterowniku masz 800 czyli powinieneś pomnożyć to x 4 impulsy na 1 krok silnika łącznie wychodzi 200 imp. na 1 mm
Załączam kalkulator w exelu
Re: Arduino GRBL - ilość kroków / ob
: 27 lip 2018, 22:59
autor: Steryd
800 impulsow to 4mm (jeden obrót)
Zatem jeden milimetr to ok, 800/4 impulsów.
Około, bo raz, skok śruby nie będzie idealny, podział na mikrokroki to 2. Jak Ci wychodzi 210, to jakieś 5% odchylenia, ale zrób test na największym odcinku na jakim dasz radę, bedzie dokladniej.
Re: Arduino GRBL - ilość kroków / ob
: 28 lip 2018, 19:10
autor: jarod21
Dzięki za odpowiedz,
wszystko działa ok, na 35cm brak różnicy w ustawieniu i pomiarze, zwykła taśma miernicza więc słabo precyzyjnie ale wychodzi w punkt 35cm przy 200 imp/ob
Re: Arduino GRBL - ilość kroków / ob
: 23 wrz 2018, 21:26
autor: jarod21
Witam,
nadal mam problem z odległościami , pomiary słabe , co może być przyczyną ??
udało się wyfrezować koty wymiary 10cmx10cm, prędkość z f100 , prędkość x,y 1000.
przy większych odległościach np 30cm pomiar nie odbiega zbyt wiele ale przy 1,2,3mm masakra.
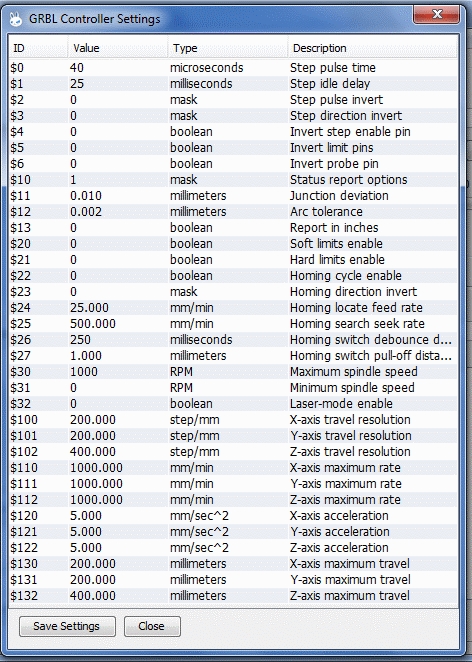
ustawienia grbl
bez różnicy czy 800 czy 1600 imp/ob
filmy poniżej
step size 1, feed rate 1 - 0,93 mm
https://youtu.be/dCtY5S_iZn8
step size 1, feed rate 10 - 0,84 mm
https://youtu.be/l-IBge0Pzf4
step size 1, feed rate 100 - 0,54 mm
https://youtu.be/9Xnihy8ozQI
Ktoś ma jakiś pomysł ??
Re: Arduino GRBL - ilość kroków / ob
: 24 wrz 2018, 13:52
autor: tomcat65
Gdyby odchyłka była stała, byłyby to luzy. Pewnie i tak są.
Im większa prędkość - mniejszy przesuw. Ewidentne gubienie kroków przez silnik.
Przyczyny:?
- Za wysoka rampa przyspieszeń?
- Duże opory ruchu?
- Za słabe zasilanie silników?
Zacznij od pierwszego.
Albo i za słabe silniki do poruszanej masy.
Re: Arduino GRBL - ilość kroków / ob
: 24 wrz 2018, 14:25
autor: gothye
Z ustawień w GRBL które są podane , przyspieszenie silników następuje bardzo wolno więc ok , ale parametr $0 masz zbyt duży co może powodować opóźnienia kodu timera do obsługi sterowników silników krokowych ,wg mnie powinno zawierać od 3 do max 10 po próbuj z takimi wartościami
Re: Arduino GRBL - ilość kroków / ob
: 24 wrz 2018, 23:38
autor: jarod21
Witam,
przetestowałem wszystkie ustawienia i nic,
udało się dopiero jak parametr $1 mam na 255 czyli step idle delay na zawsze włączony, sterowniki szumią ale nie grzeją się i silniki zimne, przyspieszenie 100mm/sek2 i 2000mm/min podział na 20 mikrokroków , bez problemu czy mam 0,1mm czy 10 mm ustawia się idealnie bez względu na prędkość

Dzięki za pomoc natomiast nie wiem dlaczego muszę mieć $1 na 255.
Dodane 1 godzina 15 minuty 24 sekundy:
filmik z pozycjonowania - 1mm , f100, i f2000
https://youtu.be/E6mukz_hSpc