




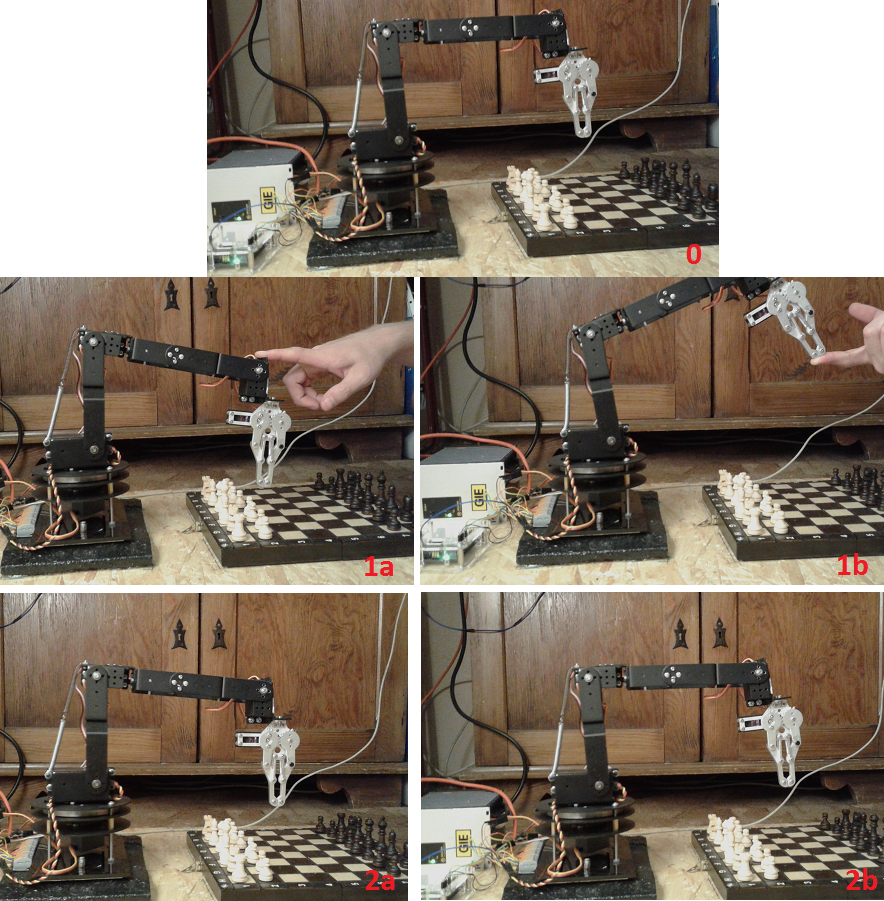
Problem widać na poniższym obrazku:
Na każdym ze zdjęć silniki są włączone i mają podawaną stałą pozycję.
Na zdjęciu "0" widać ramię w naturalnej pozycji.
Na zdjęciach "1a" i "1b" kolejno dociskam i podnoszę ramię używając bardzo niewielkiej siły. Opór silnika zaczynam czuć dopiero w pozycjach widocznych na zdjęciach.
Na zdjęciu "2a" pokazana jest pozycja ramienia po tym, jak minimalnie go przycisnąłem na zdjęciu "1a". Analogiczna sytuacja jest na zdjęciach 1a-1b. Widać, że martwy kąt jest tutaj dość szeroki.
Między zdjęciami "2a" i "2b" widać jaki może powstać luz na ramieniu.
Im dalej wychylam ramię od punktu zaczepu, tym niżej mi schodzi na luzie.
Nie wiem czy luz na serwach nie został spowodowany też poprzez niejednokrotne przywalenie ramieniem w podłoże, zanim zaprogramowałem poprawnie kinematykę odwrotną i odpowiednie zabezpieczenia.
Szukam zatem serw, które pozwolą mi tego problemu uniknąć. Oczytałem się, że serwa cyfrowe dają przy małym wychyleniu proporcjonalnie dużo większy moment, co powoduje że są one bardziej dokładne od analogowych. Zakładam, że użycie serw z metalowymi zębatkami też zwiększy dokładność. Wyczytałem także, że serwa cyfrowe wymagają specjalnego programatora- jak to wygląda? Czy jest wymagane i skomplikowane?
Czym się zatem dokładnie kieruję przy doborze serw:
-duża dokładność i minimalny luz/kąt martwy (duża powtarzalność),
-w miarę przemysłowa trwałość i żywotność,
-oczywiście cena,
-ew. integralność z łatwo dostępnymi na rynku gotowymi uchwytami na serwa, jak np. te: http://goo.gl/MX8TLK
Czynniki które nie mają dla mnie znaczenia:
-pobór mocy,
-kąt wychylenia (tylko w jednym serwie potrzebuję kąta pracy większego nić 60 stopni),
-prędkość reakcji i obrotu (w sumie dla mnie im wolniej tym lepiej).
Wiem, że takie serwa są drogie, zatem wychodzę do was z pytaniem na co patrzeć, na co uważać; co, gdzie i jak kupić. Co do ceny to wolę nawet trochę przepłacić i mieć odrobinę lepsze serwo niż potrzebuję, niż mieć na odwrót i wywracać pionki podczas ich chwytania, tj. mieć serwo którego nie uzyję.
Serwa których szukam:
-jedno, które jest w stanie unieść wg moich obliczeń max 10kg/cm
-drugie, które jest w stanie podnieść połowę mniej
-trzecie do obrotu ramienia wokół własnej osi. Siła tam może być jeszcze mniejsza, jako że ciężar powstający podczas wychylenia ramienia spada na konstrukcję.
Wymiarów szukałbym "standardowych", czyli właśnie takich jak pod uchwyt w linku powyżej. Takie serwo, których używam ma takie wymiary: http://goo.gl/u5mROF
Może powinien zadać na początku pytanie- czy droga którą idę jest dobra? Raczej wolałbym nie zmieniać koncepcji mojego projektu ze względu na ilość pracy i pieniędzy, które aktualnie włożyłem, ale jak w tej konstrukcji byłoby to niemożliwe do osiągnięcia, to będę musiał przemyśleć to i owo.


")
")






