Strona 1 z 3
strojenie serva
: 07 kwie 2015, 10:36
autor: kamar
Witam.
Potrzebuje pomocy przy zestrojeniu serva z zewnętrznym enkoderem ale nie pozycjami a prędkościami. Prościej - enkoder obraca się ze stałą prędkością a potrzebuje kręcić servem z zadanym przelożeniem. Niby to jakoś jest ustawione ale gdy enkoder staje, servo jeszcze minimalnie się kręci. Pomoże ktoś ?
: 07 kwie 2015, 10:45
autor: Zienek
Jakie servo, jaki servopack?
Pewnie musisz podjechać z ustawieniami wzmocnień.
: 07 kwie 2015, 13:00
autor: kamar
A tam, te cholerne serva

Chodzą fizyce wbrew
Ma wpisane 0 V to się kręci, dostaje niby +0.05 V to ładnie stoi.
: 07 kwie 2015, 14:42
autor: hecza
Jeśli to Siemens Masterdrives MC to można spróbować w parametrze - P631 AnaIn Offset .
Pozdrawiam
: 07 kwie 2015, 15:35
autor: kamar
hecza pisze:Jeśli to Siemens Masterdrives MC to można spróbować w parametrze - P631 AnaIn Offset .
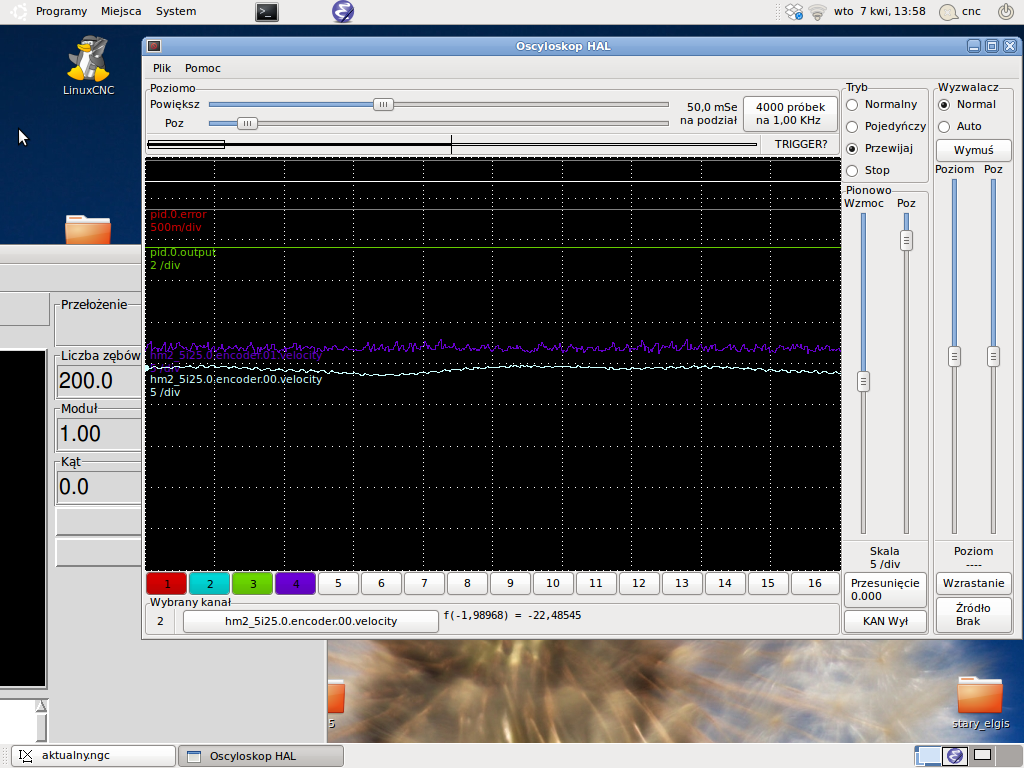
To się przyda jak już będzie dograne żeby nie pamiętać. Bardziej chodzi o ustabilizowanie sygnału wejściowego z enkodera lub zmniejszenie czułości serva na minimalne wahania.
Wygląda to "prawie" dobrze ale to "prawie" po kilkunastu minutach obrotów wchodzi w szkodę
: 07 kwie 2015, 16:49
autor: hecza
Nie wiem Kolego co tam znowu kombinujesz (obwiedniówka ?).
Ale, mniejsza o to – mimo że to servo z encoderem, jeżeli pracuje pod kontrolą LinuxCNC to może tracić pozycję - LinuxCNC wyświetla swoje, a maszyna jest gdzie indziej.
Należy odpowiednio dostroić PID w LinuxCNC – najważniejszy jest (chyba) f-error dla danej osi – polecam
http://gnipsel.com/linuxcnc/tuning/servo.html
Dla sprawdzenia zawsze prawidłowa pozycja jest wyświetlana w Drive Monitor – maszyna po całym dniu pracy musi wrócić na tą samą pozycję w obu programach.
Jest jeszcze parę niespodzianek, ale może się nie zdarzą.
PID w Masterdrive MC też jest ważny – głównie ze względu na osiąganą moc i inne …..
Pozdrawiam
: 07 kwie 2015, 18:12
autor: kamar
hecza pisze:
Dla sprawdzenia zawsze prawidłowa pozycja jest wyświetlana w Drive Monitor – maszyna po całym dniu pracy musi wrócić na tą samą pozycję w obu programach.
Jak pisałem wyżej, pozycja mnie nie interesuje a nawet wprost przeciwnie
Nadganianie i powroty są wykluczone.
Ważny jest tylko stosunek prędkości obrotowych
PID LinuxCNC poszedł w pi..duuu
: 07 kwie 2015, 19:14
autor: hecza
kamar pisze: pozycja mnie nie interesuje a nawet wprost przeciwnie
...i nie musi, ale program musi wiedzieć, by nie wchodzić w szkodę.
kamar pisze: Nadganianie i powroty są wykluczone.
... nie wiem o co chodzi.

kamar pisze:Ważny jest tylko stosunek
... też uważam go za coś bardzo ważnego.

kamar pisze:PID LinuxCNC poszedł w pi..duuu
... nie mogę się domyślić, gdzie on poszedł, ale trzeba go ogarnąć, by siedział na miejscu i trzymał wszystko w ryzach.

Pozdrawiam
: 07 kwie 2015, 22:01
autor: gaspar
a co to za wzmacniacz? Siemens, yaskawa inne?
: 07 kwie 2015, 22:09
autor: kamar
Siemens. Już praktycznie chodzi ale coś mu jeszcze brak.