



Dziękuję. Nie chciałbym zaśmiecać tego ("nie naszego") tematu, więc bardzo skrótowo : pracują dwie osie na raz, trzecia to tylko stopień zagłębienia / lotu nad materiałem ustalane pomiędzy obiektami, taktowanie 16MHz, assembler. Przed zabraniem się do projektu powinieneś troszkę policzyć choćby na przykład transmisja - nie wiem jak wygląda Twoja ramka ale przeliczając przykładowo Twoje 19200 / 3 osie / 10bitów / 3bajty na oś + CRC, to wychodzi, że nie masz możliwości fizycznie przesłać nawet 200 komend na sekundę - więc jeśli wieloboki tnie Ci dobrze bo bufor danych pracuje prawidłowo, a koło nie, to na pewno tu tkwi problem bo nie zdążysz tą prędkością transmisji uzupełniać bufora (chyba, że masz jak piszesz kartę pamięci do której wgrasz wcześniej program). Jeśli rozpracujesz już odbieranie i interpretację g-kodów tekstowych - to policz ile bajtów zajmie Ci przesłanie jednej linii... Masz po prostu złe założenia i nawet 100x szybszy procesor tutaj nie pomoże.
Mimo wszystko nie jest to właściwy temat do takich rozmów.
pozdrawiam
Sterowanie dodatkowymi urządzeniami poprzez USB.



")
-
jarekk
- ELITA FORUM (min. 1000)
")
- Posty w temacie: 1
- Posty: 1701
- Rejestracja: 17 mar 2006, 08:57
- Lokalizacja: Gdańsk
Nie lepiej od razu ARM ? . Jest to sterownik który zrobiłem dla Step2Cnc ( wersja dla ploterów termicznych). Tu jest LPC2138, obecnie to bym wziął już LPC1768 ( Cortex M3, 100MHz)
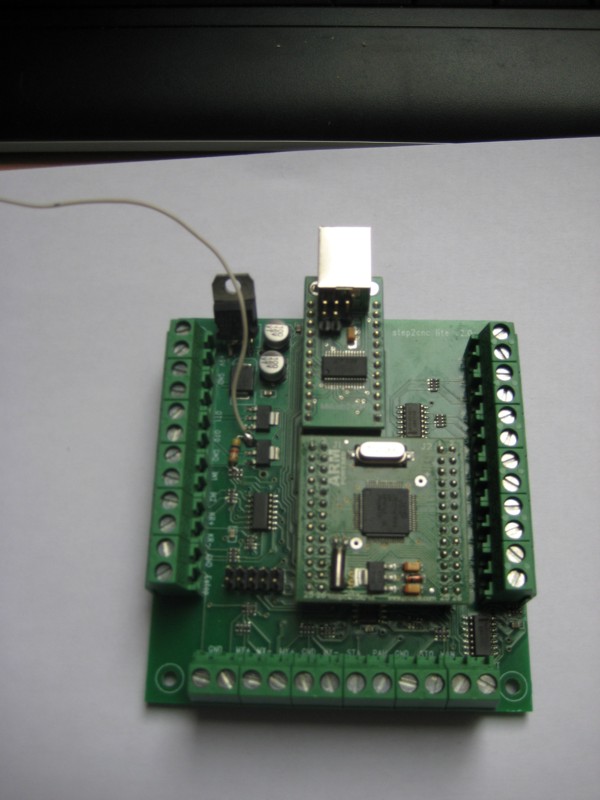
[ Dodano: 2010-04-06, 12:36 ]
Złożony z płytki bazowej i gotowych modułów z Propox'u
[ Dodano: 2010-04-06, 12:38 ]
Lepiej przetwarzać G-kody na PC i wysyłać tylko wektory ruchu. Znacznie łatwiej i szybciej - tak działa mój sterownik.
[ Dodano: 2010-04-06, 12:36 ]
Złożony z płytki bazowej i gotowych modułów z Propox'u
[ Dodano: 2010-04-06, 12:38 ]
Lepiej przetwarzać G-kody na PC i wysyłać tylko wektory ruchu. Znacznie łatwiej i szybciej - tak działa mój sterownik.







