Realizacja trajektorii ruchu o ksztalcie prostokata
: 21 lip 2014, 13:35
Witam wszystkich forumowiczow
Od kilku dobrych godzin mecze sie nad zadaniem realizacji nastepujacego zadania:
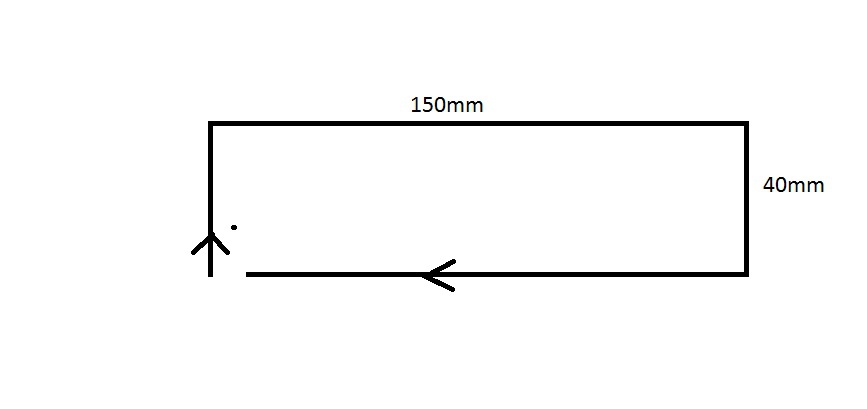
2 naprzeciw siebie umiejscowione chwytaki maja poruszac sie zgodnie z trajektoria jak na rysunku ponizej. (Chodzi o marszczenie materialu wzdluz metalowej rury). Wykorzystanie cylindrow pneumatycznych raczej odpada, ze wzgledu na wysoka potrzebna czestotliwosc. Planuje wykorzystac uklad korbowy, badz tez jarzmowy do realizacji jednego kierunku , schody zaczynaja sie przy kierunku prostopadlym. czy ktos ma jakas pomocna rade, lub zna przyklad urzadzen o podobnej kinematyce ruchu, ktore sprawdza sie przy wysokich czestotliwosciach ruchu?
Od kilku dobrych godzin mecze sie nad zadaniem realizacji nastepujacego zadania:
2 naprzeciw siebie umiejscowione chwytaki maja poruszac sie zgodnie z trajektoria jak na rysunku ponizej. (Chodzi o marszczenie materialu wzdluz metalowej rury). Wykorzystanie cylindrow pneumatycznych raczej odpada, ze wzgledu na wysoka potrzebna czestotliwosc. Planuje wykorzystac uklad korbowy, badz tez jarzmowy do realizacji jednego kierunku , schody zaczynaja sie przy kierunku prostopadlym. czy ktos ma jakas pomocna rade, lub zna przyklad urzadzen o podobnej kinematyce ruchu, ktore sprawdza sie przy wysokich czestotliwosciach ruchu?