DQ542MA
: 02 lip 2018, 07:27
Witam wszystkich,
potrzebuje rady, opinii odnośnie mojego połączenia sterownika DQ542MA.
Robiąc pierwsze próby ze sterowaniem odkryłem, że nie wychodzą mi sygnały z komputera przez LPT więc chwilowo generuje sygnał z arduino.
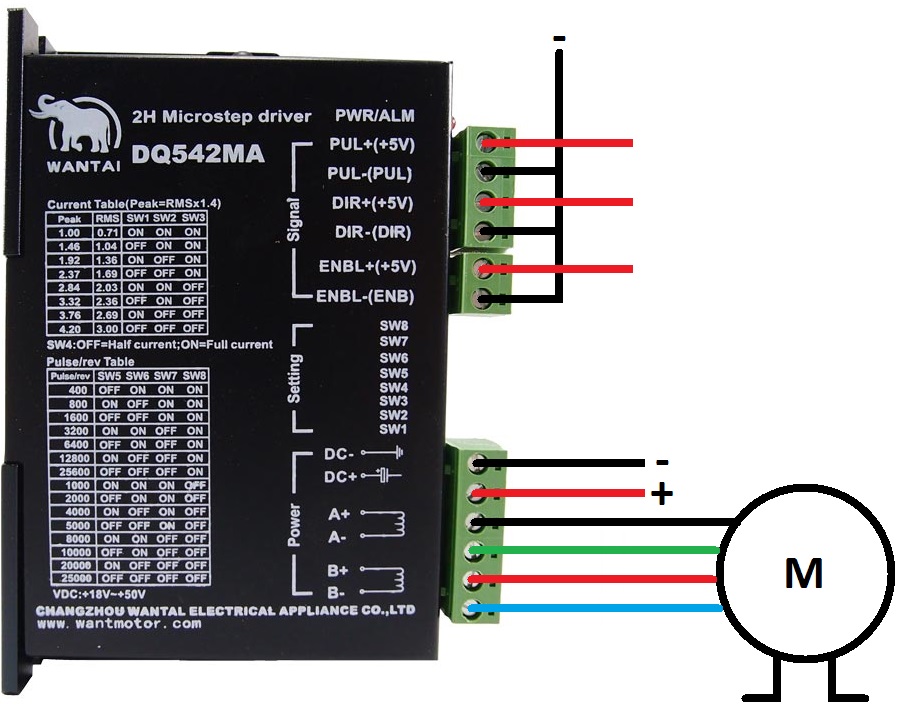
Sterownik podpięty tak:
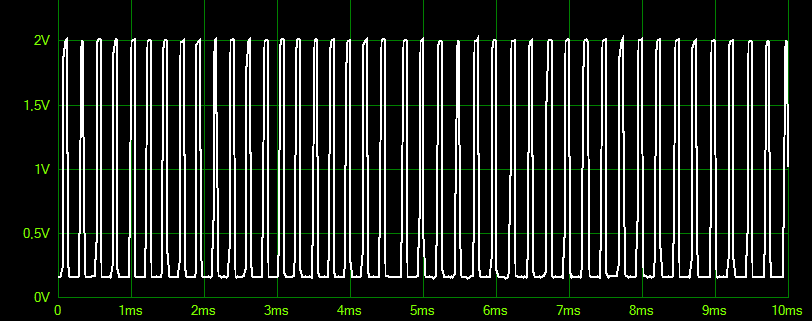
Sygnał na PUL+:
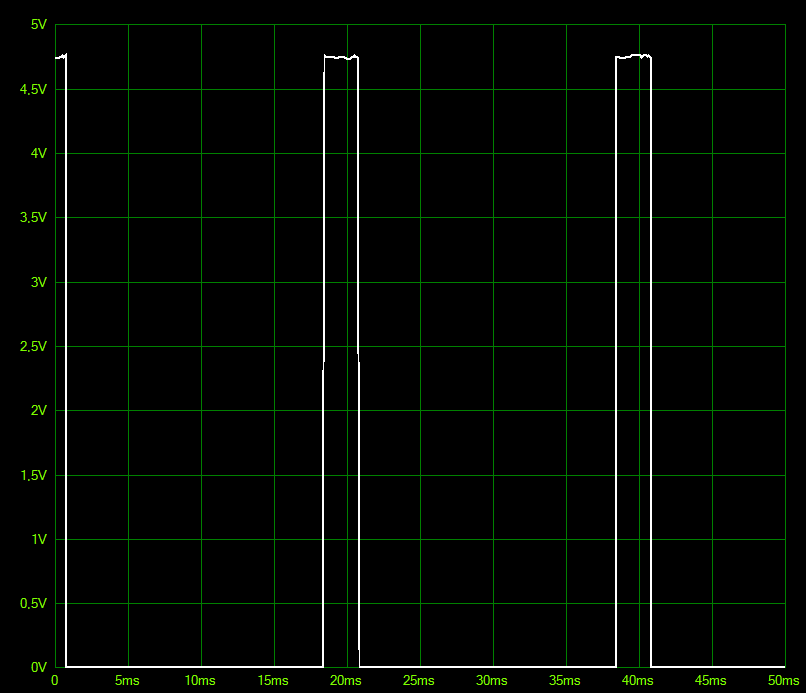 >
>
SW1 - OFF
SW2 - OFF
SW3 - OFF
SW4 - ON
SW5 - ON
SW6 - ON
SW7 - ON
SW8 - ON
na DIR+ nie daje napięcia bo kierunek mnie nie interesuje (narazie)
silnik: Wantai Stepper Motor Nema23 WT57STH115-4204A 4,2A(U) 1,8° /step
i teraz do rzeczy:
Gdy ENBL+ jest zasilone 5V zapala się na sterowniku czerwona dioda PWR/ALM.
Przy wyłączonym ENBL, w chwili gdy włączam zasilanie silnika (36V) silnik daje opór. Generując sygnał na PUL+ słychać, że coś się dzieje (buczy jak by chciał przeskakiwać) ale nie kręci. Myślałem, że może przewody pomieszane, sprawdziłem dokumentacje od chińczyka - wszystko OK. Sprawdziłem miernikiem - OK. Zamieniłem niebieski z czerwonym - nie kręci. Po jakimś czasie silnik się nagrzał ale nie drgnał ani trochę.
Czy ktoś ma jakąś koncepcje co może być nie tak? Mi wydaje się, że wszystko jest OK (choć zdarzają się zaćmienia umysłu). Może to być wina generowanego sygnału? (częstotliwość, wypełnienie)? I dlaczego 5V na ENBL+ włącza alarm?
Z góry dzięki za rady, opinie.
Pozdro
potrzebuje rady, opinii odnośnie mojego połączenia sterownika DQ542MA.
Robiąc pierwsze próby ze sterowaniem odkryłem, że nie wychodzą mi sygnały z komputera przez LPT więc chwilowo generuje sygnał z arduino.
Sterownik podpięty tak:
Sygnał na PUL+:
>SW1 - OFF
SW2 - OFF
SW3 - OFF
SW4 - ON
SW5 - ON
SW6 - ON
SW7 - ON
SW8 - ON
na DIR+ nie daje napięcia bo kierunek mnie nie interesuje (narazie)
silnik: Wantai Stepper Motor Nema23 WT57STH115-4204A 4,2A(U) 1,8° /step
i teraz do rzeczy:
Gdy ENBL+ jest zasilone 5V zapala się na sterowniku czerwona dioda PWR/ALM.
Przy wyłączonym ENBL, w chwili gdy włączam zasilanie silnika (36V) silnik daje opór. Generując sygnał na PUL+ słychać, że coś się dzieje (buczy jak by chciał przeskakiwać) ale nie kręci. Myślałem, że może przewody pomieszane, sprawdziłem dokumentacje od chińczyka - wszystko OK. Sprawdziłem miernikiem - OK. Zamieniłem niebieski z czerwonym - nie kręci. Po jakimś czasie silnik się nagrzał ale nie drgnał ani trochę.
Czy ktoś ma jakąś koncepcje co może być nie tak? Mi wydaje się, że wszystko jest OK (choć zdarzają się zaćmienia umysłu). Może to być wina generowanego sygnału? (częstotliwość, wypełnienie)? I dlaczego 5V na ENBL+ włącza alarm?
Z góry dzięki za rady, opinie.
Pozdro