Strona 1 z 1
Sigma Win parametry serva
: 07 sie 2016, 19:47
autor: nowicjusz7
: 09 sie 2016, 15:00
autor: atom1477
Chodzi Ci o moment trzymający podczas postoju silnika (podczas pracy gdy sterownik zadaje prędkość = 0)?
: 09 sie 2016, 16:45
autor: mc2kwacz
Silniki AC słabo trzymają. Właściwie to trzyma regulator, nawet przy super sterowaniu wektorowym. Do tego są hamulce.
Zwiększaj delikatnie position gain. Ale uważaj - to jest regulator! Mogą pojawić się oscylacje. A jak przegniesz, to niegasnące wibracje.
Poczytaj manual do tego sterowania, może jakiś inny parametr za moment statyczny odpowiada.
: 09 sie 2016, 22:25
autor: nowicjusz7
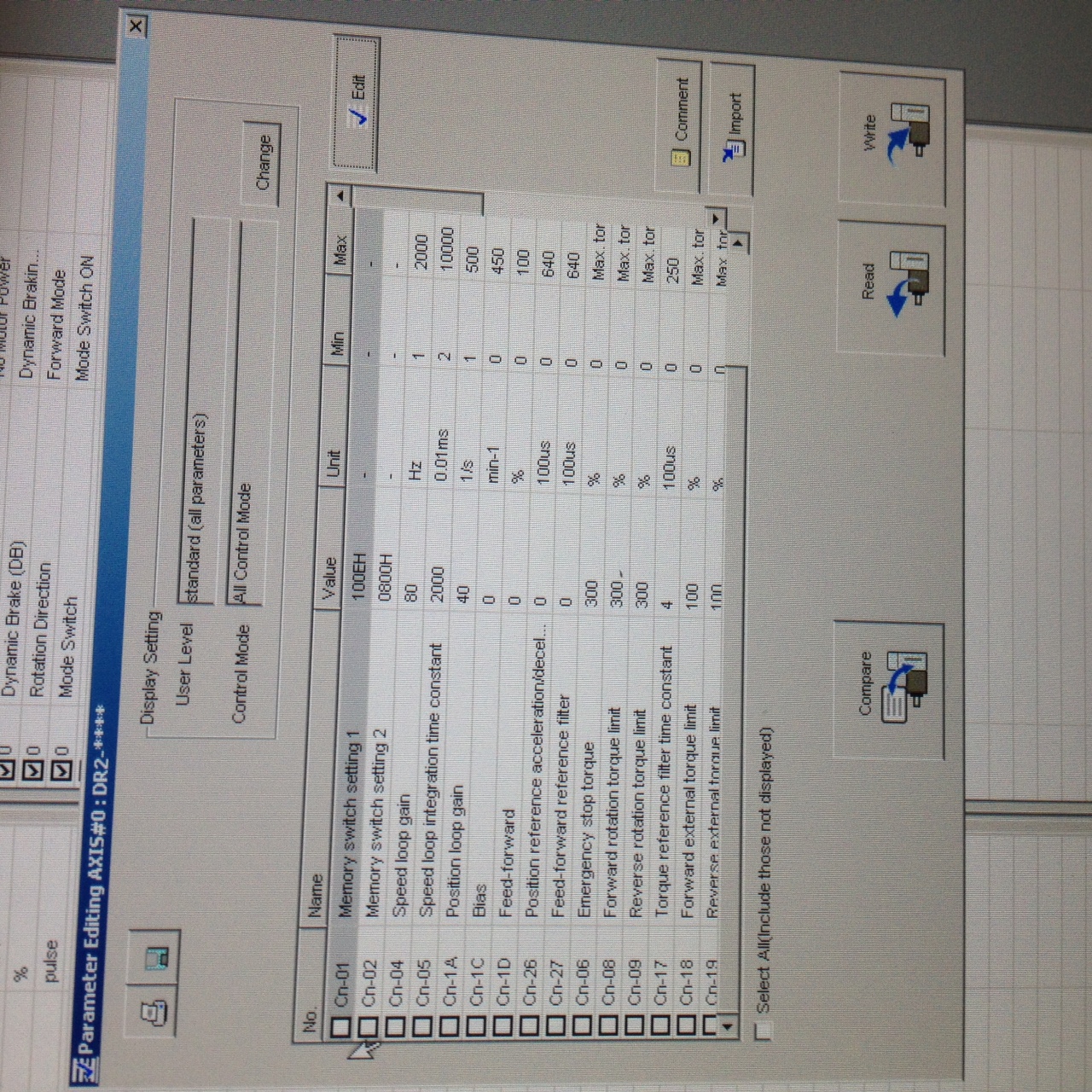
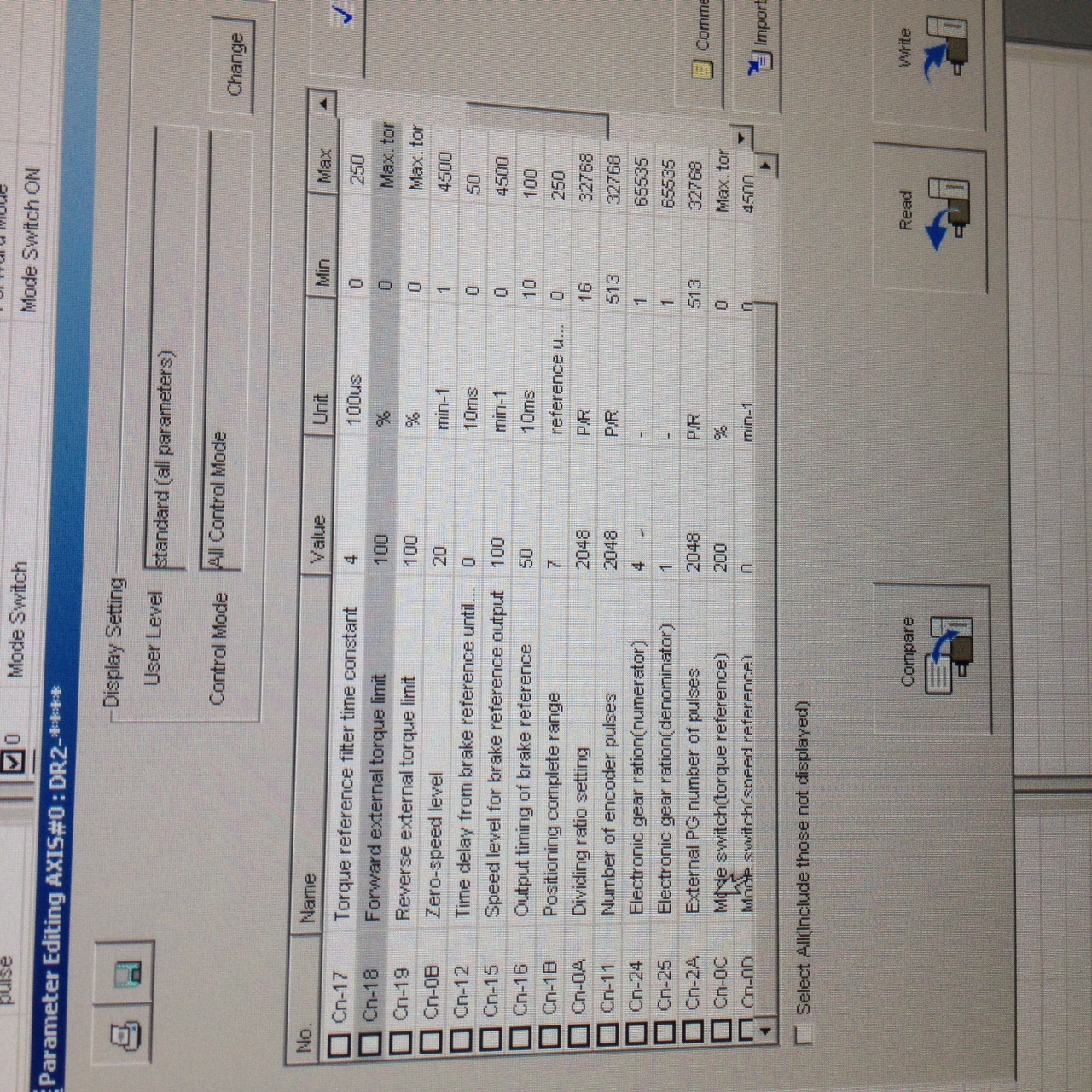
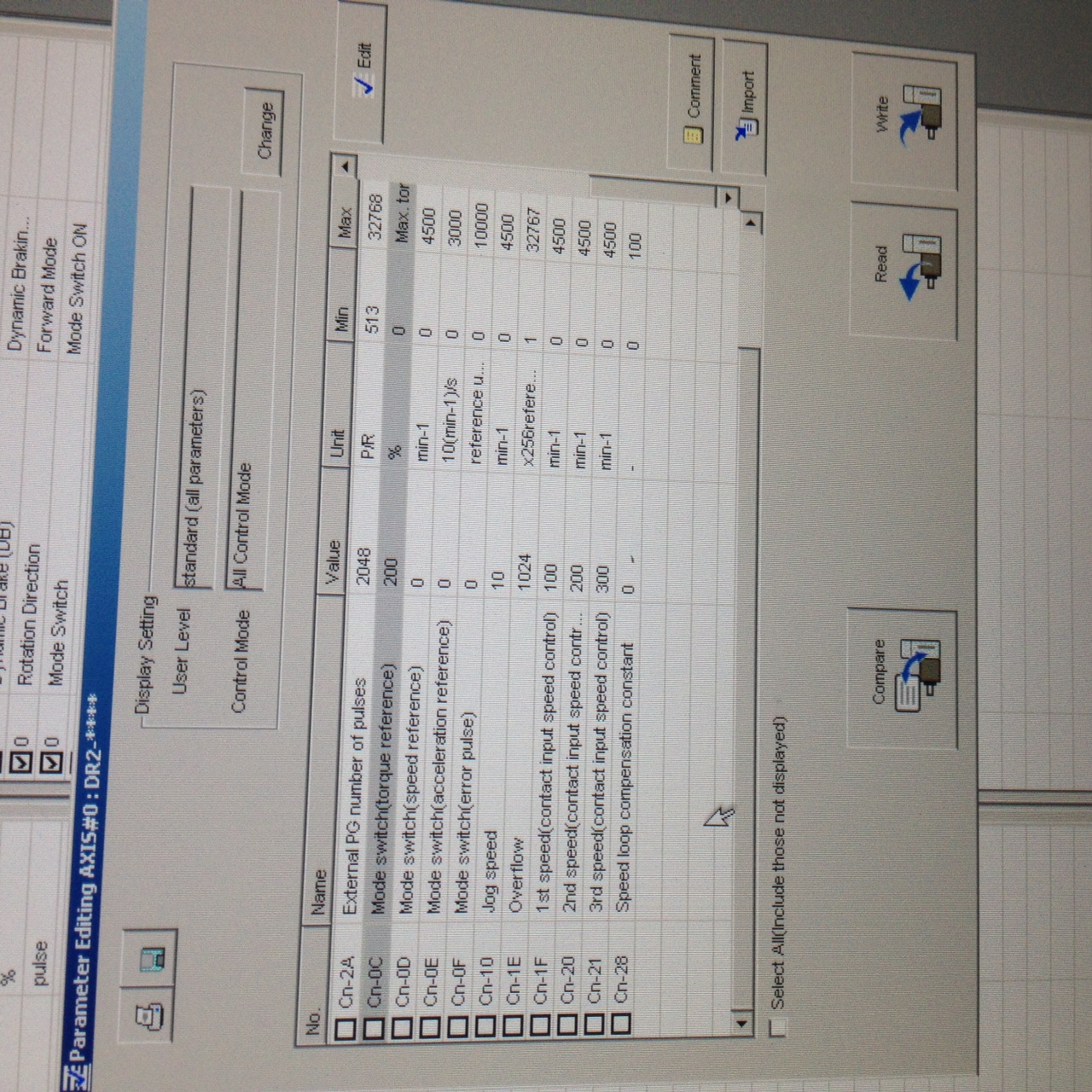
Tak chodzi mi o prędkość 0, faktycznie regulacja tego wzmocnienia pomogła. Dzisiaj pojawił się kolejny problem, w ustawieniu falownika osi X ustawiłem servo 400W aby kontrola odbywała się przez zmianę pozycji, i wszystko ładnie działa z macha, ale już w falowniku 800W te ustawienia nie działają, może mógłby ktoś zrobić zdjęcie swoich ustawień ? Wyczki Cn-1 i Cn-2
: 09 sie 2016, 23:20
autor: atom1477
Ale w jaki sposób nie działa?
: 09 sie 2016, 23:44
autor: nowicjusz7
Słychać tylko ten charakterystyczny świst Serva, ale brak jest reakcji na zmianę pozycji w machu. Po przełożeniu z osi Y do osi X wtyczki falownik pracuje normalnie. Więc dlatego obstawiam ustawienia falownika.
: 11 sie 2016, 16:53
autor: dragon44
Ustaw speed loop gain na 200-250 Hz. To "szybkość" pętli sprzężenia zwrotnego, generalnie im więcej, tym sztywniej. W katalogu yaskawa podaje, że do zastosowań takich jak napędzanie śruby tocznej parametr ten powinien wynosić 200-300 z tego co pamiętam. Ja u siebie miałem 300 Hz i strasznie piszczały mi silniki, 200 Hz wiele nie pomogło, ale mam wrażenie, że maszyna pracuje bardziej miękko. W tym temacie
https://www.cnc.info.pl/topics60/frezar ... 098,60.htm nieco się męczyłem z yaskawą. Już nie pamiętam, co tam było, może coś dla siebie znajdziesz. A co do samego strojenia to masz tam normalne PID. Poczytaj w sieci jak to się stroi, bo dokładnie nie pamiętam. Chyba najpierw parametr P, czyli wzmocnienie należy podnosić, do puki układ zachowuje się jeszcze stabilnie. Następnie człon inercyjny i całkujący, ale nie pamiętam z głowy jak to szło.