Prosty i tani sterowniczek by soki
: 20 maja 2011, 00:39
Witam wszystkich!
Planuję wykonać sobie styro-ciachajkę (2x osie XY), ale ma to być konstrukcja tania. Zacząłem wiec od przemyśleń na temat sterowników dla silników krokowych. O samej wycinarce będzie później i w innym dziale.
I tak oto postanowiłem poddać Waszej ocenie mój wynalazek. Tym razem wykonałem prosty sterowniczek dla silników unipolarnych, bazujący na układach TTL. W związku z faktem, iż dotychczas działałem na układach programowalnych, można powiedzieć, że cofnąłem mój sterownik w rozwoju, jednak wcale nie. Utrzymane zostały parametry dotychczasowych moich produkcji, a wyeliminowane problematyczne elementy (dla wielu ludzi programowanie mikrokontrolerów to duża przeszkoda). A jako, że udostępniam swoje prace na różnych forach wiązało się to z wieloma pytaniami i problemami.
Moje założenia:
- praca półkrokowa (sterowanie krok/kierunek z funkcją enable)
- stabilizacja prądu (ustawiana odgórnie rezystorami stratnymi)
- niewygórowana cena
- prostota konstrukcji
Co udało się osiągnąć? W zasadzie wszystko. Sterownik pracuje poprawnie i bez zgrzytów. Cena? Jak to się mówi cena czyni cuda, przekona to wielu - niecałe 20zł dla jednej osi. Najdroższe są mosfety. Sterownik oparty jest o dwukierunkowy licznik binarny (4516) oraz demultiplekser (74HCT238) pracujący w trybie trzybitowym. Dzięki tym dwóm układom otrzymujemy dwukierunkowy 8-bitowy licznik pierścieniowy. Poprzez połączenie diodami impulsowymi 1N4148 otrzymujemy pracę półkrokową. Stabilizatory prądowe są liniowe, a ich zasadę działania łatwo odgadnąć ze schematu.
Parametry:
- napięcie wejściowe max 24V (ale przy takim napięciu przydałoby się solidne chłodzenie)
- prąd na fazę max 1.5~2A (liniowe ograniczniki prądu dla każdej fazy oddzielnie, należy pilnować maksymalnej mocy rozpraszania dla mosfetów końcowych - ja zastosowałem BUZ11 oraz testowo IRFZ-44N). Bardzo ważne aby tranzystory miały wbudowaną diodę zwrotną.
- współpraca ze wszystkimi programami dającymi sygnały step / dir
- napięcia sterujące w standardzie TTL.
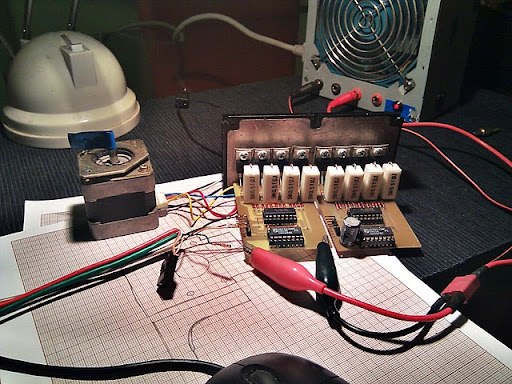
Parę fotek. Poniżej podczas testów:
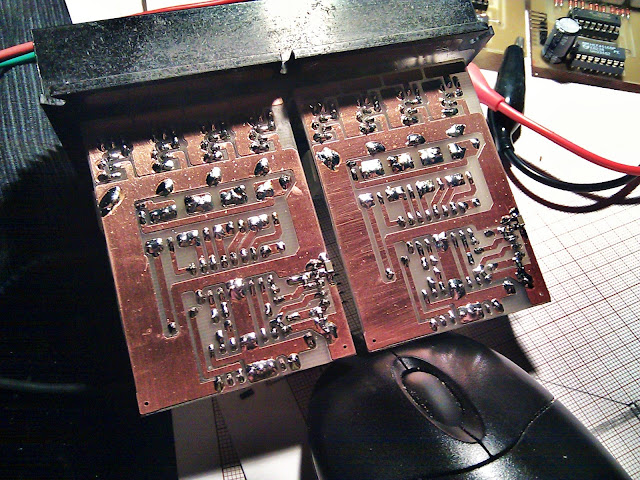
Widok od strony druku (płytki frezowałem samodzielnie):
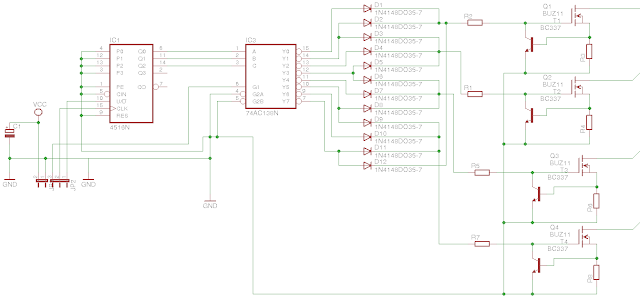
Schemat:
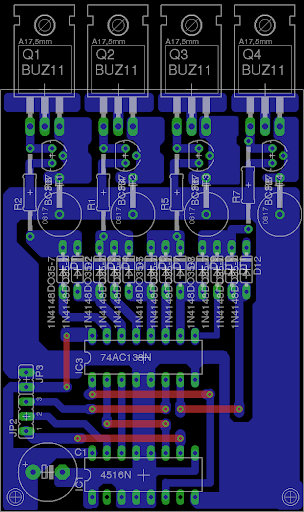
Płytka:
Podczas testów dałem przymaławy radiator i po 15 minutach było ciepło
Planuję wykonać sobie styro-ciachajkę (2x osie XY), ale ma to być konstrukcja tania. Zacząłem wiec od przemyśleń na temat sterowników dla silników krokowych. O samej wycinarce będzie później i w innym dziale.
I tak oto postanowiłem poddać Waszej ocenie mój wynalazek. Tym razem wykonałem prosty sterowniczek dla silników unipolarnych, bazujący na układach TTL. W związku z faktem, iż dotychczas działałem na układach programowalnych, można powiedzieć, że cofnąłem mój sterownik w rozwoju, jednak wcale nie. Utrzymane zostały parametry dotychczasowych moich produkcji, a wyeliminowane problematyczne elementy (dla wielu ludzi programowanie mikrokontrolerów to duża przeszkoda). A jako, że udostępniam swoje prace na różnych forach wiązało się to z wieloma pytaniami i problemami.
Moje założenia:
- praca półkrokowa (sterowanie krok/kierunek z funkcją enable)
- stabilizacja prądu (ustawiana odgórnie rezystorami stratnymi)
- niewygórowana cena
- prostota konstrukcji
Co udało się osiągnąć? W zasadzie wszystko. Sterownik pracuje poprawnie i bez zgrzytów. Cena? Jak to się mówi cena czyni cuda, przekona to wielu - niecałe 20zł dla jednej osi. Najdroższe są mosfety. Sterownik oparty jest o dwukierunkowy licznik binarny (4516) oraz demultiplekser (74HCT238) pracujący w trybie trzybitowym. Dzięki tym dwóm układom otrzymujemy dwukierunkowy 8-bitowy licznik pierścieniowy. Poprzez połączenie diodami impulsowymi 1N4148 otrzymujemy pracę półkrokową. Stabilizatory prądowe są liniowe, a ich zasadę działania łatwo odgadnąć ze schematu.
Parametry:
- napięcie wejściowe max 24V (ale przy takim napięciu przydałoby się solidne chłodzenie)
- prąd na fazę max 1.5~2A (liniowe ograniczniki prądu dla każdej fazy oddzielnie, należy pilnować maksymalnej mocy rozpraszania dla mosfetów końcowych - ja zastosowałem BUZ11 oraz testowo IRFZ-44N). Bardzo ważne aby tranzystory miały wbudowaną diodę zwrotną.
- współpraca ze wszystkimi programami dającymi sygnały step / dir
- napięcia sterujące w standardzie TTL.
Parę fotek. Poniżej podczas testów:
Widok od strony druku (płytki frezowałem samodzielnie):
Schemat:
Płytka:
Podczas testów dałem przymaławy radiator i po 15 minutach było ciepło