bldc - prosba o wytlumaczenie pewnej sprawy.
: 17 sty 2010, 20:22
Witam.
Zabieram sie do zbudowania sterownika BLDC. Przez ostatni tydzien przegladnalem sporo materialow w Internecie, szczegolnie zwracajac uwage na noty aplikacyjne (np. z Microchipa czy Atmela - mozna znalezc cale rozwiazania, lacznie ze schematami). Im wiecej czytalem, tym wydawalo mi sie, ze wiecej wiem. Ale wyglada na to, ze im wiecej sie wie tym wiecej sie nie wie . O co konkretnie mi chodzi?
. O co konkretnie mi chodzi?
Moze najpierw napisze, co chcialbym skonstruowac (na razie jako uklad testowy do przetestowania silnika). Chcialbym mianowicie na wal silnika nakrecic tarcze (bezposrednio albo przez przelozenie) i zawiesic na tym ciezar. Obrot walu bedzie powodowal wciaganie lub opuszczanie ciezaru. No i tu zaczely sie moje watpliwosci odnosnie mojego rozumienia BLDC (wiem, najlepiej poeksperymentowac i tak zrobie, ale najpierw chcialem sobie to dokladnie przemyslec).
Chcialbym jako stopni mocy uzyc klasycznego chyba rozwiazania, to znaczy dac po trzy MOSFETY N i P (silnika ma 3 uzwojenia), chce miec jakies sensory, na poczatek zaczne od czujnikow halla, potem moze cos dokladniejszego (zalezy mi bardzo na plynnej pracy silnika).
Tzn. wedlug jak np:
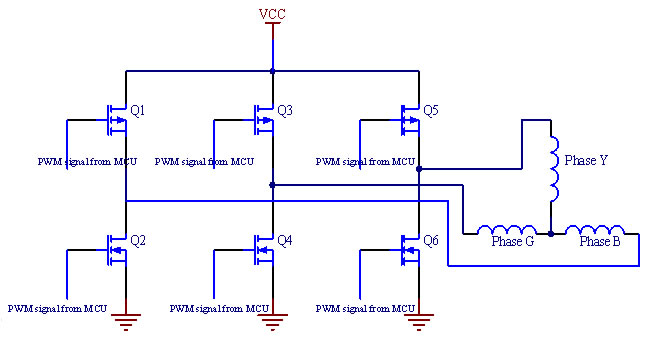
Moje pytania sa nastepujace (zahacza wlasciwie o podstawowa rzecz, ale na prawde nie moge tego pojac jakos). Mianowicie jak wiadomo, predkosc silnika zalezy od napiecia, a moment od pradu. Co jest kontrolowane przez wypelnienie PWMa w sterowniku jak powyzej?? W fazie startowej prad, a potem obroty? Czy mozna w takim razie niezaleznie kontrolowac RPM i moment sily? Od czego zalezy przyspieszenie (od pradu ktory przeklada sie na moment?). Powiedzmy ze za pomoca tej mojej wyciagarki chce podniesc metalowy bloczek z podlogi, ktory poczatkowo sobie tam spoczywa, a potem trzymac go nieruchomo nad podloga. W momencie, gdzy bloczek wisi nieruchomo w powietrzu rozumiem, ze mam zasilac tylko te uzwojenia, na ktorych skonczylem cykl, bez zadnego juz komutowania?
Tu nota z Microchipa, jak by ktos chcial zagladnac
http://ww1.microchip.com/downloads/en/a ... 00885a.pdf
Za wszelkie porady, chocby czesciowo naprowadzajace, bede bardzo wdzieczny.
Pozdrawiam
Zabieram sie do zbudowania sterownika BLDC. Przez ostatni tydzien przegladnalem sporo materialow w Internecie, szczegolnie zwracajac uwage na noty aplikacyjne (np. z Microchipa czy Atmela - mozna znalezc cale rozwiazania, lacznie ze schematami). Im wiecej czytalem, tym wydawalo mi sie, ze wiecej wiem. Ale wyglada na to, ze im wiecej sie wie tym wiecej sie nie wie
Moze najpierw napisze, co chcialbym skonstruowac (na razie jako uklad testowy do przetestowania silnika). Chcialbym mianowicie na wal silnika nakrecic tarcze (bezposrednio albo przez przelozenie) i zawiesic na tym ciezar. Obrot walu bedzie powodowal wciaganie lub opuszczanie ciezaru. No i tu zaczely sie moje watpliwosci odnosnie mojego rozumienia BLDC (wiem, najlepiej poeksperymentowac i tak zrobie, ale najpierw chcialem sobie to dokladnie przemyslec).
Chcialbym jako stopni mocy uzyc klasycznego chyba rozwiazania, to znaczy dac po trzy MOSFETY N i P (silnika ma 3 uzwojenia), chce miec jakies sensory, na poczatek zaczne od czujnikow halla, potem moze cos dokladniejszego (zalezy mi bardzo na plynnej pracy silnika).
Tzn. wedlug jak np:
Moje pytania sa nastepujace (zahacza wlasciwie o podstawowa rzecz, ale na prawde nie moge tego pojac jakos). Mianowicie jak wiadomo, predkosc silnika zalezy od napiecia, a moment od pradu. Co jest kontrolowane przez wypelnienie PWMa w sterowniku jak powyzej?? W fazie startowej prad, a potem obroty? Czy mozna w takim razie niezaleznie kontrolowac RPM i moment sily? Od czego zalezy przyspieszenie (od pradu ktory przeklada sie na moment?). Powiedzmy ze za pomoca tej mojej wyciagarki chce podniesc metalowy bloczek z podlogi, ktory poczatkowo sobie tam spoczywa, a potem trzymac go nieruchomo nad podloga. W momencie, gdzy bloczek wisi nieruchomo w powietrzu rozumiem, ze mam zasilac tylko te uzwojenia, na ktorych skonczylem cykl, bez zadnego juz komutowania?
Tu nota z Microchipa, jak by ktos chcial zagladnac
http://ww1.microchip.com/downloads/en/a ... 00885a.pdf
Za wszelkie porady, chocby czesciowo naprowadzajace, bede bardzo wdzieczny.
Pozdrawiam