




Chciałbym zaprezentować Wam moją konstrukcję, a jest nią manipulator typu SCARA, sterowany za pomocą g-kodu. Pierwotnie efektorem miało być wrzeciono, ale konstrukcja ta raczej nadaje się do zabawy niż do frezowania.
Projekt ten można by podzielić na następujące części:
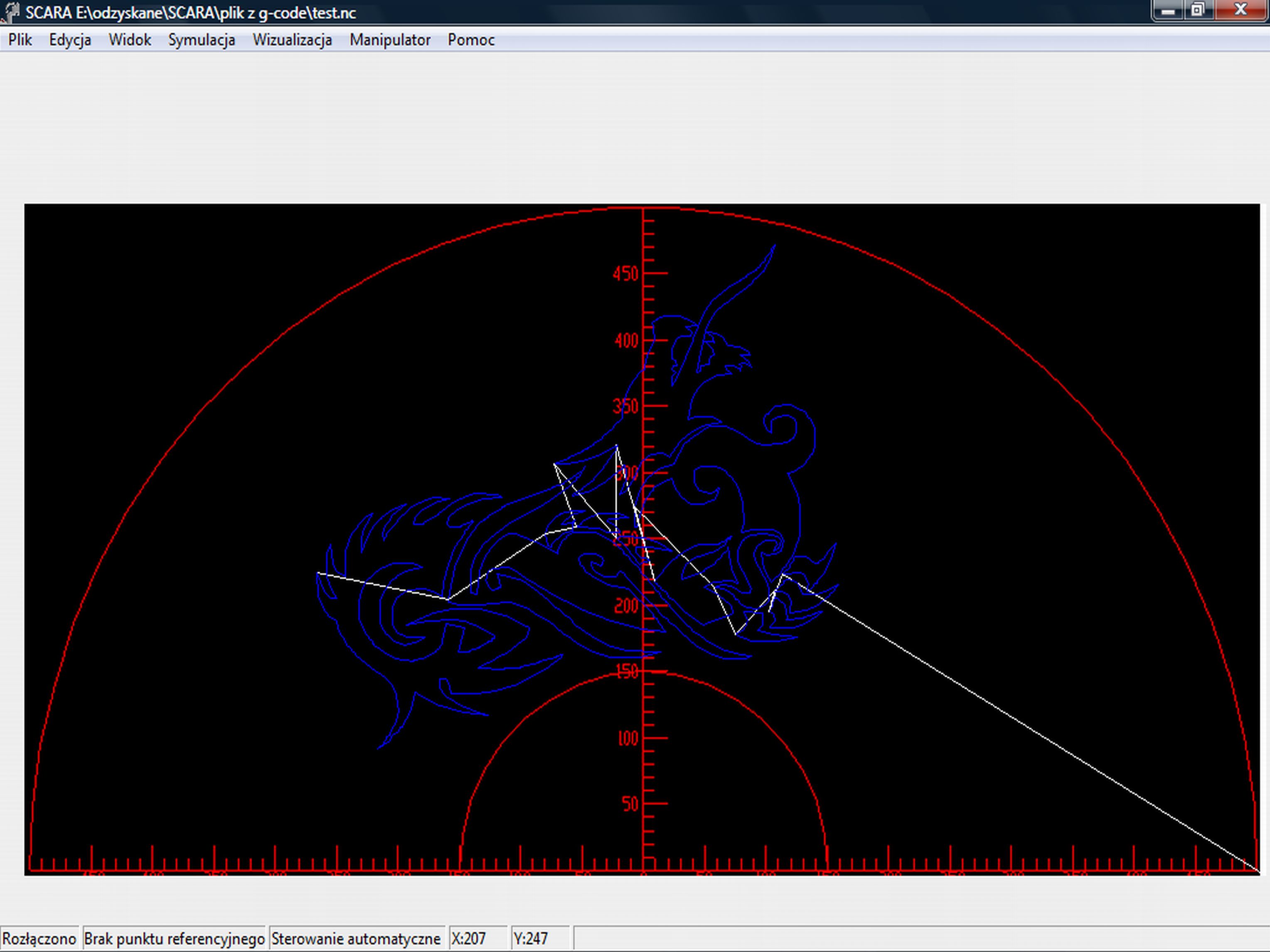
1. Oprogramowanie komputerowe – napisane w Delphi, którego zadaniem jest:
- Otwieranie projektów z g-kodem, jego interpretacja oraz przedstawienie w postaci graficznej. Możliwa jest również edycja g-kodu, poprzez ręczną zmianę poszczególnych wpisów, lub przez przesuwanie obrazka za pomocą myszki.
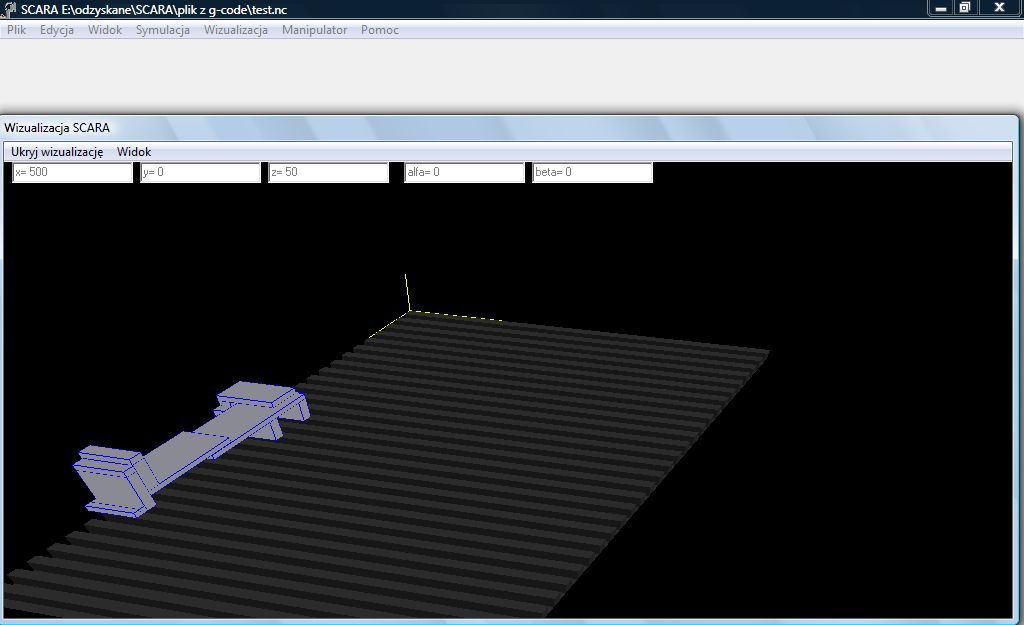
- Symulacja i wizualizacja ruchów manipulatora – w oparciu o OpenGL.
- Komunikacja ze sterownikiem mikroprocesorowym, zmiana nastaw niektórych parametrów sterownika, wysyłanie programu do sterownika.
- Interpretacja języka hpgl i konwersja na g-kod.
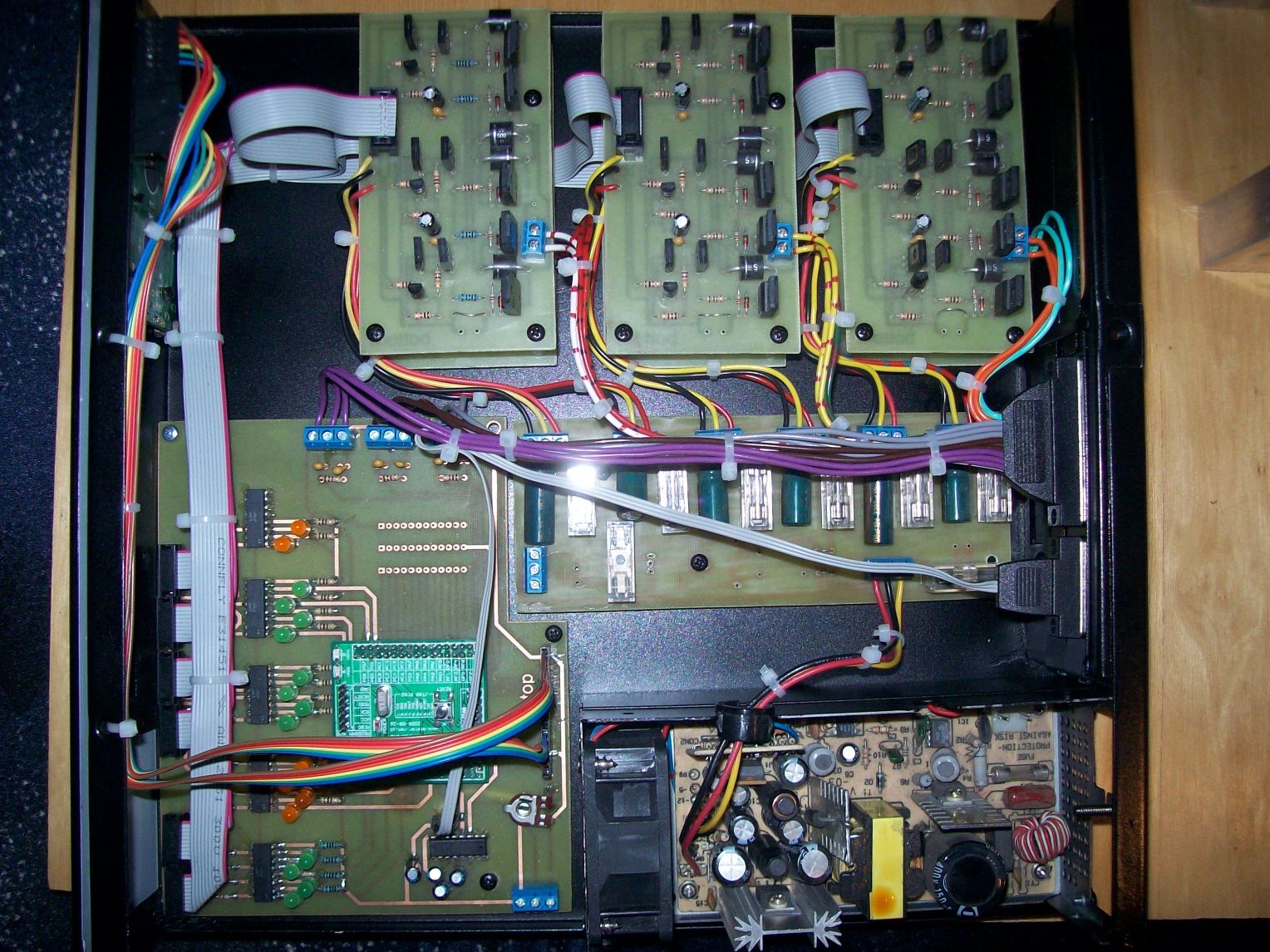
2. Część elektroniczna:
a) Sterownik mikroprocesorowy, którego sercem jest mikrokontroler ATMega128. Program napisany został w C i zawiera ponad 1500 linijek kodu (wydruk całego programu czcionką 11 zająłby ponad 30 stron). Sterownik ten odpowiada za:
- Komunikacje z komputerem PC po RS232 – odbiera dane z PC i wysyła potwierdzenia, jeśli dane są poprawne. Protokół komunikacyjny powstał w oparciu o protokół MODBUS. Do kontroli poprawności komunikatów użyto algorytmu obliczania sum kontrolnych CRC16.
- Interpretacja komunikatów (w tym g-kodu), interpolacja ruchów manipulatora.
- Mikrokrokowe sterowanie 3 silnikami krokowymi bipolarnymi.
- Obsługa wyświetlacza LCD 4x20 znaków, na którym wyświetlana jest aktualnie wykonywana instrukcja, aktualne kąty oraz pozycja manipulatora i komunikaty pomocnicze
b) 3 czujniki pola magnetycznego (TLE4905), służące do pozycjonowania manipulatora.
c) 6 mostków H sterujących silnikami krokowymi, zbudowanymi w oparciu o tranzystory MOSFET, po 2 na każdy silnik. Pomiędzy mostkami a mikrokontrolerem zastosowano optoizolację.
d) Zasilacz wraz z płytką z bezpiecznikami.
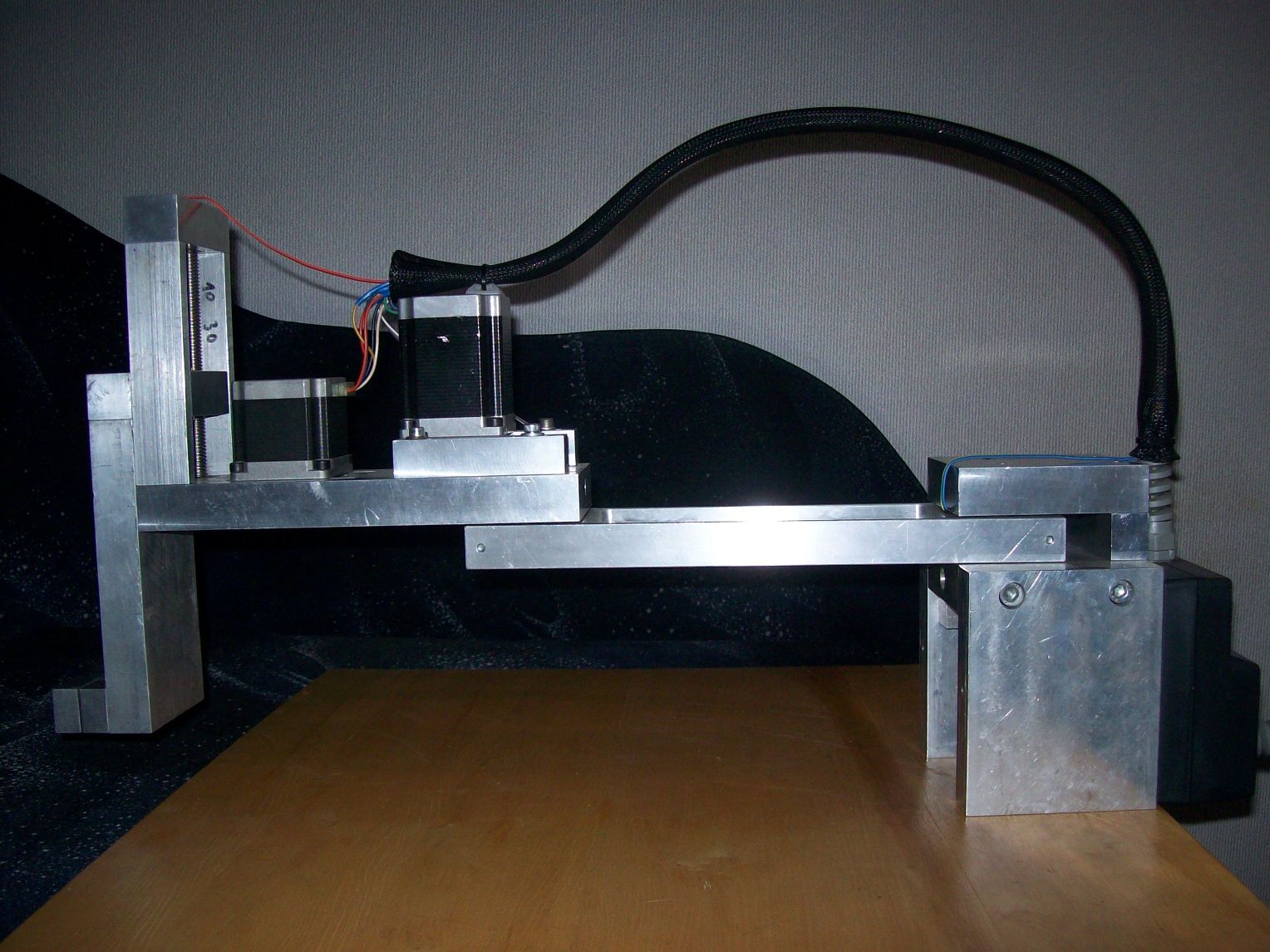
3. Konstrukcja mechaniczna – zbudowana ze stopu aluminium. Każde z ramion ma 25cm długości. Ramiona są napędzane są za pomocą silników krokowych, poprzez przekładnie z paskiem zębatym, zwiększając ich moment 4 krotnie. Oś pionowa Z napędzana jest za pomocą śruby trapezowej, poprzez mniejszy od pozostałych silnik i przekładnie 1-1.
Ciężko opisać tutaj całość, więc zapraszam do komentowania oraz zadawania pytań. Jako załącznik zamieszczam program z przykładowym plikiem z g-kodem.
Pozdrawiam


")






