Jestem uczniem technikum o profilu mechatronicznym, po wakacjach idę do 3 klasy
Wymarzyłem sobie zbudowanie własnego robota. Zacząłem od projektu i obliczeń. I właśnie tu pojawiły się pierwsze problemy.
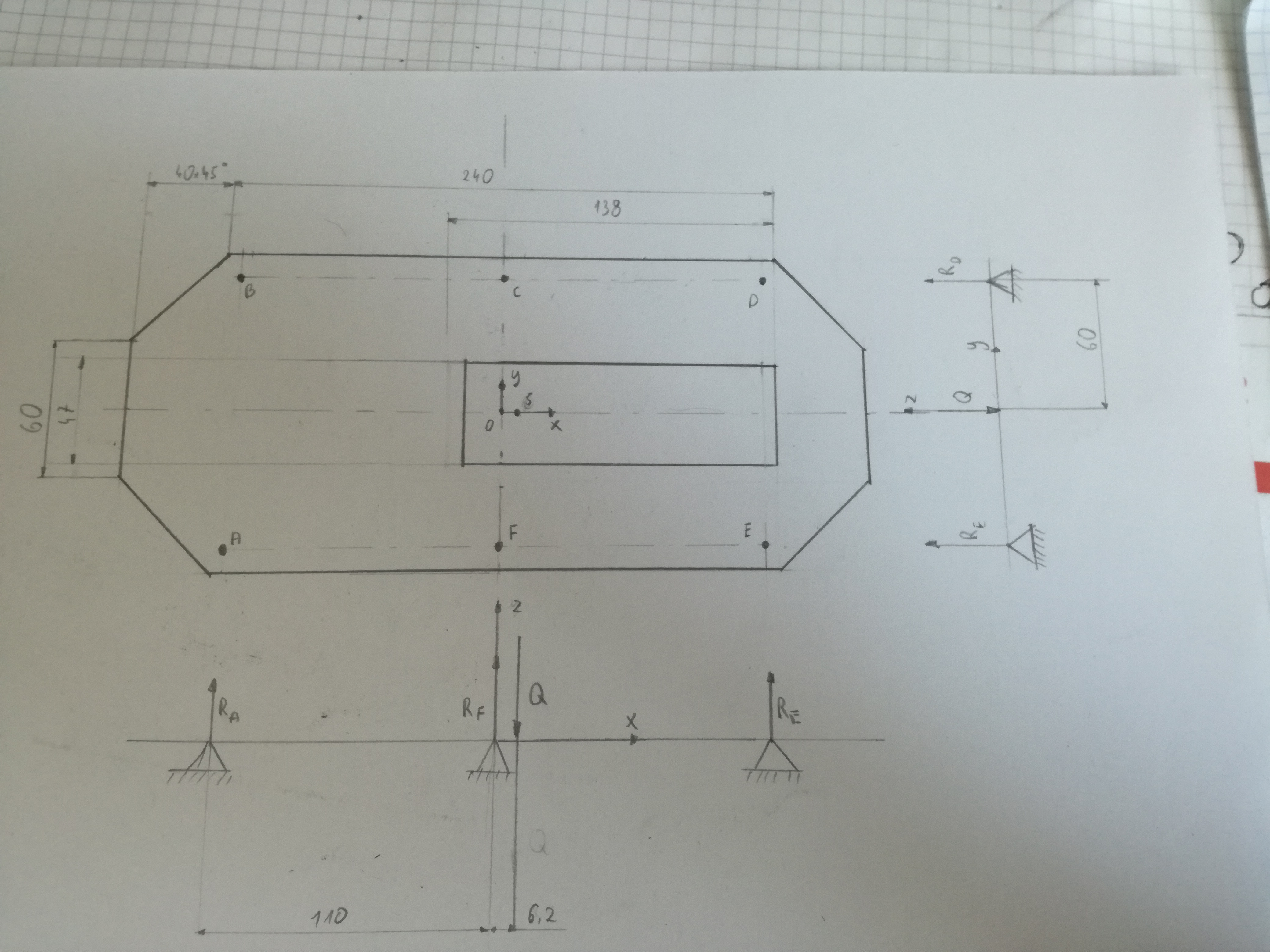
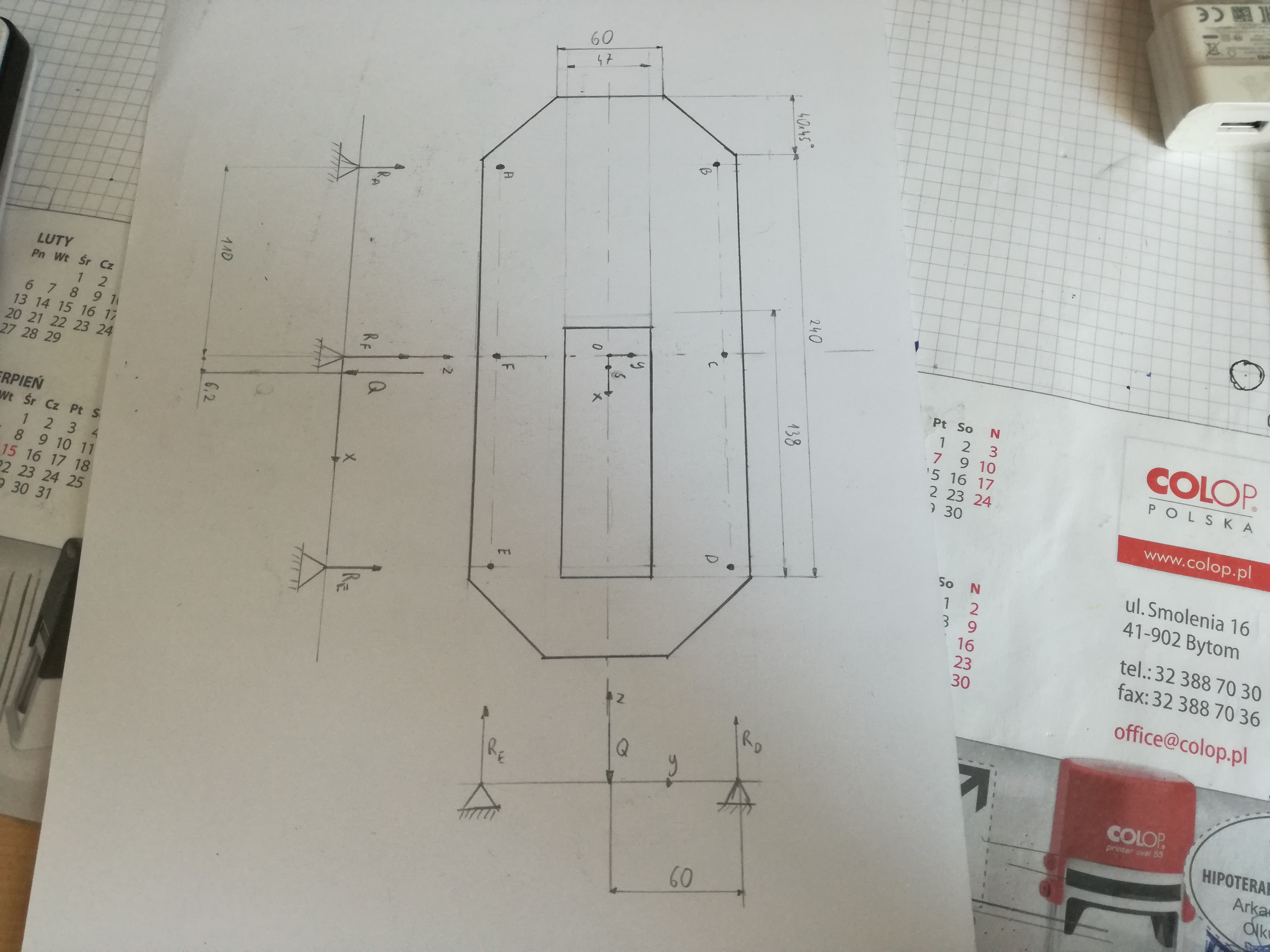
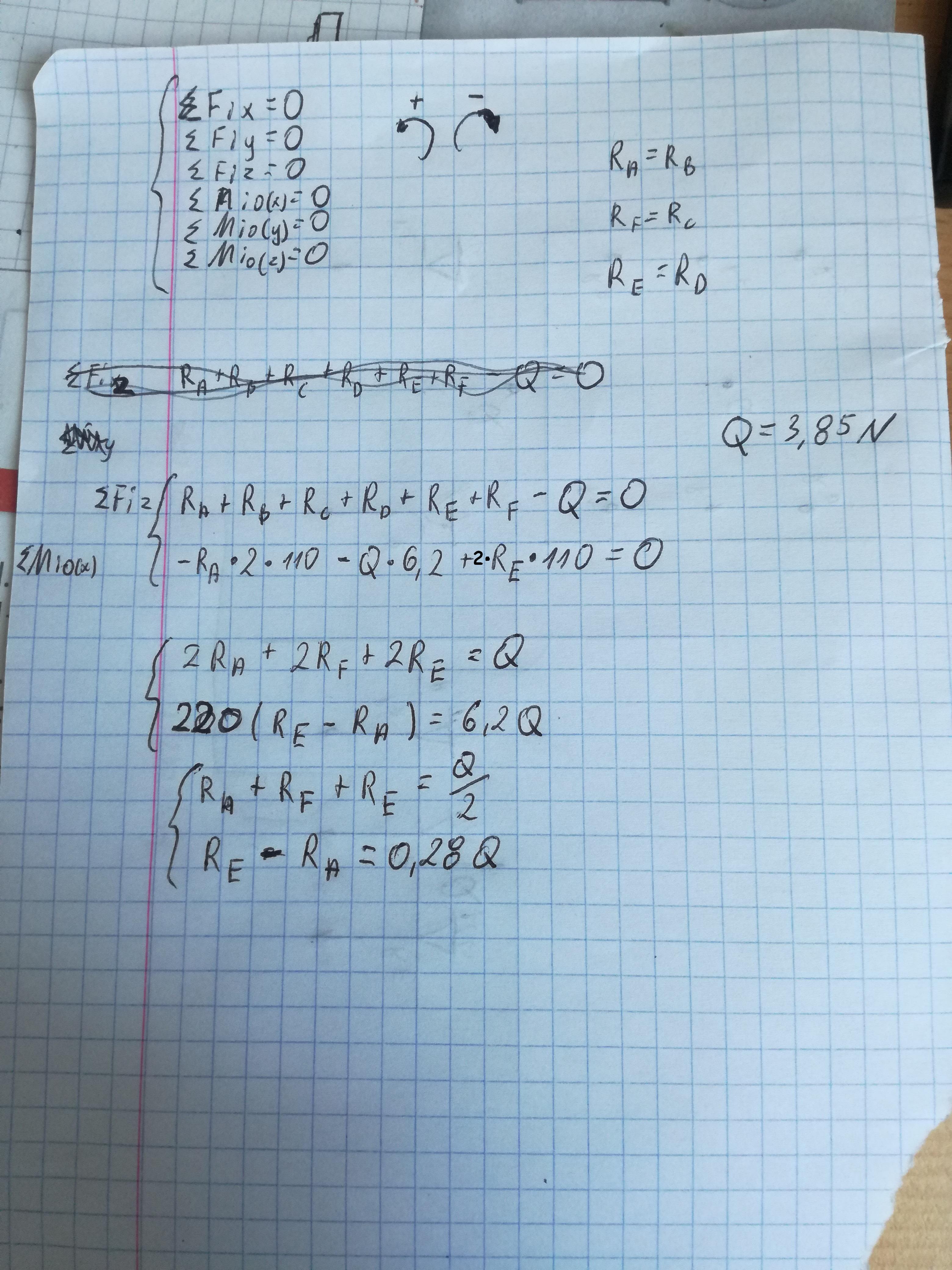
W załączniku jest schemat i obliczenia jakie udało mi się wykonać.
Mam nadzieje, że wszystko zrobiłem dobrze, jeśli zauważycie jakiś błędy to poprosiłbym o natychmiastową odpowiedź.
Prostokąt na podstawie to zasilanie i sterownik serw.
A, B, C, D, E, F to podpory nieruchome(w domyśle nogi).
S to środek ciężkości układu(o ile dobrze policzyłem)
O to środek układu współrzędnych, względem którego robiłem obliczenia.
Q masa(siła z jaką działa na podpory) układu=3.85[N]
Doszedłem do momentu gdzie mam 2 równania i 3 niewiadome. Niem jak rozwiązać taki układ, może gdzieś wcześniej popełniłem błąd. Jeśli ktoś ma wiedzę i chęci żeby mi pomóc to bardzo proszę