



Od jutra zaczynam lekturę, a część filmów Adama Maszynotwór już widziałem
Znaleziono 12 wyników
Wróć do „Mach3 dla serwomotor closeloop”
- 02 paź 2022, 21:41
- Forum: NASZE AMATORSKIE MASZYNY CNC
- Temat: Mach3 dla serwomotor closeloop
- Odpowiedzi: 33
- Odsłony: 5176
Re: Mach3 dla serwomotor closeloop
Zgadzam się z Wami w 100% że trzeba poznać program, będzie o niebo łatwiej jak tylko łapać potrzebne wątki a o reszcie nie mieć bladego pojęcia.
Od jutra zaczynam lekturę, a część filmów Adama Maszynotwór już widziałem
Od jutra zaczynam lekturę, a część filmów Adama Maszynotwór już widziałem
- 02 paź 2022, 19:26
- Forum: NASZE AMATORSKIE MASZYNY CNC
- Temat: Mach3 dla serwomotor closeloop
- Odpowiedzi: 33
- Odsłony: 5176
Re: Mach3 dla serwomotor closeloop
Zasilanie:
1szt zasilacz 48V 480W na 2 silniki krokowe
1szt zasilacz 48V 480W na 1 silnik zamknięta pętla
Układ sterowany:
2x sterownik Dm556
1x sterownik HBS57
2x silnik krokowy 2.1Nm na osi X i Z
1x silnik zamknięta pętla 57HBS30 na osi Y
- 02 paź 2022, 18:54
- Forum: NASZE AMATORSKIE MASZYNY CNC
- Temat: Mach3 dla serwomotor closeloop
- Odpowiedzi: 33
- Odsłony: 5176
Re: Mach3 dla serwomotor closeloop
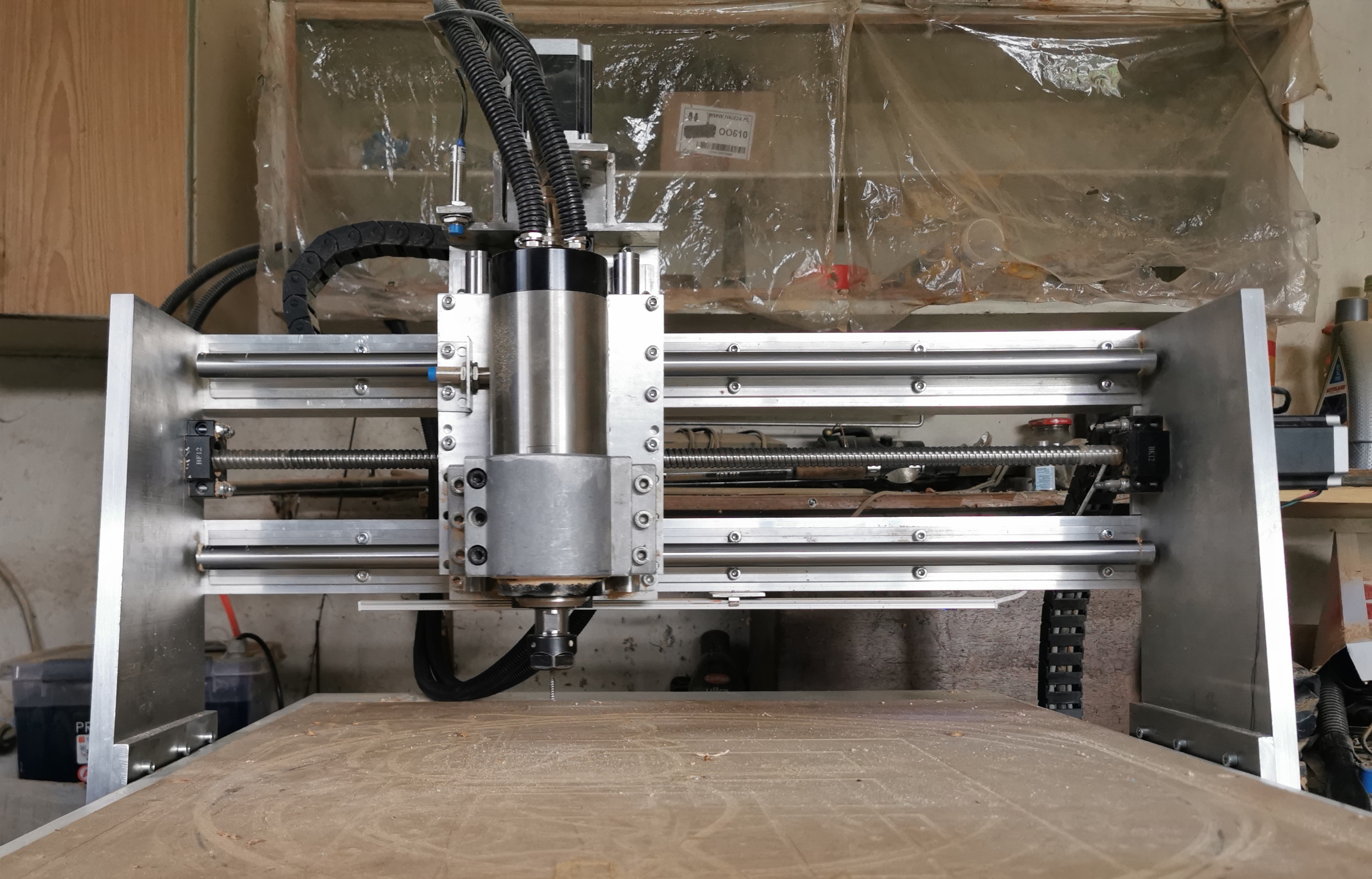
W sprawie maszyny: wszystkie osie na walkach podpartych 20mm, śruby kulowe 1610.
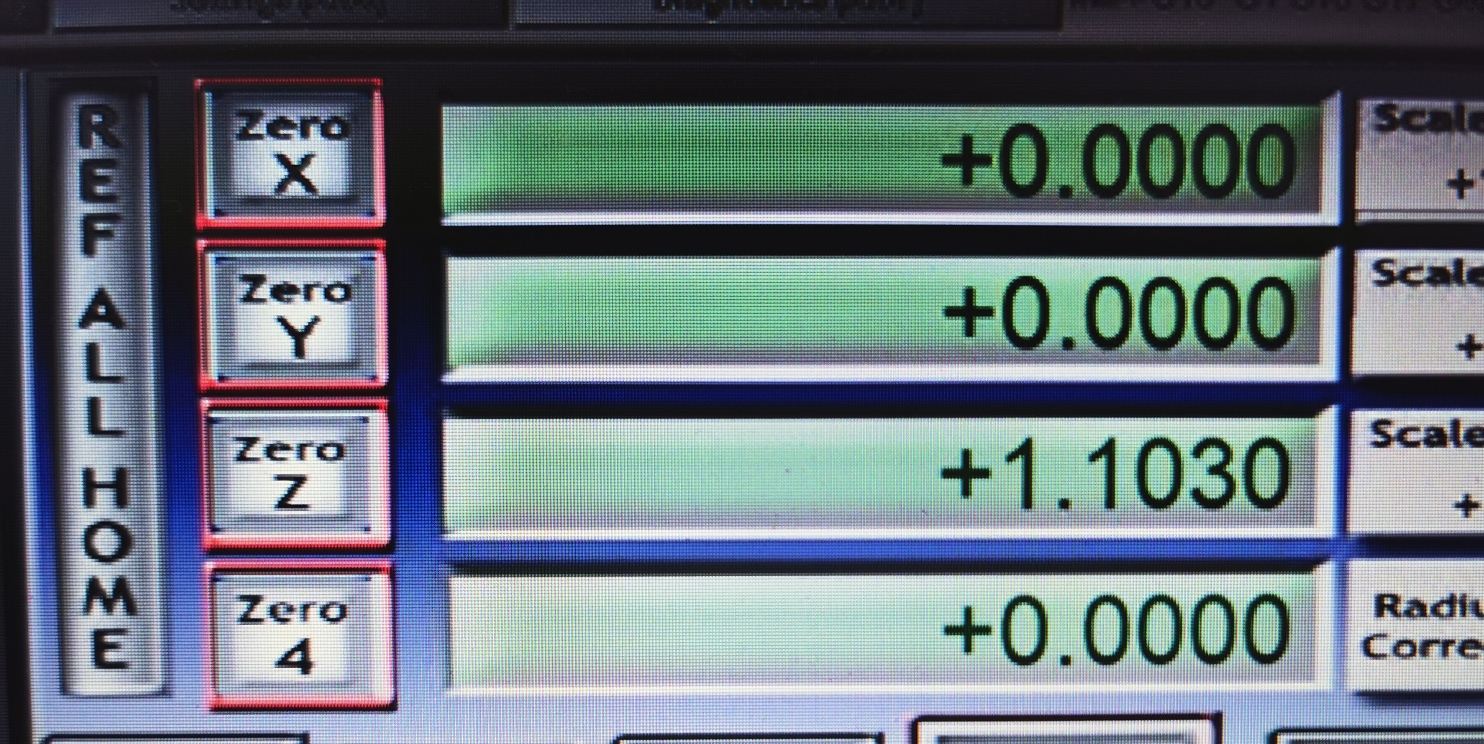
W kwestii okna gdzie chce wpisywać koordynaty to chodzi o główne okno :
Ale słuszna i bardzo pomocna podpowiedź kszumek że skrótem TAB. Jutro to spróbuję.
A co do zmian, to z pewnością zastosuje sugestie kolegi Tuxcnc w sprawie zmiany podziału mikrokroków na sterownikach z 6400 na 1000, jak również obnize trochę prędkości jazdy i przyspieszenie.
W kwestii okna gdzie chce wpisywać koordynaty to chodzi o główne okno :
Ale słuszna i bardzo pomocna podpowiedź kszumek że skrótem TAB. Jutro to spróbuję.
A co do zmian, to z pewnością zastosuje sugestie kolegi Tuxcnc w sprawie zmiany podziału mikrokroków na sterownikach z 6400 na 1000, jak również obnize trochę prędkości jazdy i przyspieszenie.
- 02 paź 2022, 17:02
- Forum: NASZE AMATORSKIE MASZYNY CNC
- Temat: Mach3 dla serwomotor closeloop
- Odpowiedzi: 33
- Odsłony: 5176
Re: Mach3 dla serwomotor closeloop
Avalyah pisze: ↑02 paź 2022, 10:23adam-opole pisze:Silniki krokowe obecnie max mogą jechać 6m/min powyżej wypadaja (brzęk i tracą kroki).adam-opole pisze:1. Uzyskuję duże prędkości 6000mm/min
Czyli - nic się nie zmieniło?
na Arduino silniki były ustawione na 5700mm/min i 45mm/s2 przez co wolno ale jednostajnie rozpędzały się nie gubiąc krokowadam-opole pisze:Czy kosztem dużych prędkości i przyspieszenia nie jestem w stanie zachować dokładności na krótkich podjazdach?
Skąd taki wniosek? Jak jedziesz wolniej to nic złego się nie dzieje? Może pokaż tę maszynę.
Ano właśnie przy tak dużych zrywach wolno się nie da, dotknięcie klawisza powoduje przejechanie osi o 11-13mm, stąd moje pytanie czy pomimo ustawień dużej prędkości osi i przyspieszenia mogę w opcjach mach3 zmienić rząd odległości z 10mm na np 0.1mm, tym samym na dokładne podjechanie na oczekiwane miejsce startu wrzeciona, dalej utrzymując duże prędkości przejazdu na pustych przejazdach po polu roboczymadam-opole pisze:Czy oraz jak można aktywować te funkcję?
Jaką funkcję?
przykładowo chce ustawić oś X w miejscu 25.500 oraz Y 50.500 , wpisuje te rzędne kolejno w oknie współrzędnych w programie, uderzenie enter nie wywołuje przejazdu bramy w daje miejsce. Jak to aktywować? W openbilds chodziło to bez problemu. Mach 3 nigdy dotąd nie obsługiwałem, stąd trochę te mogę pytania pewnie kolegów z doświadczeniem denerwują.
Swoją drogą jakbyś miał kupować macha i inne graty to rozważyłbym może inne rozwiązanie, np. pikocnc. Nie odnośnie obecnego problemu, ale ogólnej wygody, bo jak wydać tysiak na macha to równie dobrze można coś lepszego sobie sprawić od razu.
- 02 paź 2022, 10:13
- Forum: NASZE AMATORSKIE MASZYNY CNC
- Temat: Mach3 dla serwomotor closeloop
- Odpowiedzi: 33
- Odsłony: 5176
Re: Mach3 dla serwomotor closeloop
Tuxcnc - dziękuję
- 02 paź 2022, 09:05
- Forum: NASZE AMATORSKIE MASZYNY CNC
- Temat: Mach3 dla serwomotor closeloop
- Odpowiedzi: 33
- Odsłony: 5176
Re: Mach3 dla serwomotor closeloop
Dzień dobry.
Dopiąłem swego, płytka Arduino poszła do lamusa, na jej miejsce zamontowałem Mach3 USB (ta czerwona) ustawienia zgodnie z wieloma poradnikami (ebmia, kilka dla porównania z netu) ale mam dwa pytania:
1. Uzyskuję duże prędkości 6000mm/min i przyspieszenie 240mm/S2 ale straciłem na dokładności przy krótkich przejazdach, sterowniki ustawione na podział mikrostep 6400, śruba kulowa 1610.
Gdy chce zrobić długi przejazd brama śmiga aż miło, gdy chce przyjechać 5mm silnik wariuje, słychać uderzenie krokowca i brama przesuwa się np o 13mm, przy okazji silnik wyje bo gubi krok.
Czy kosztem dużych prędkości i przyspieszenia nie jestem w stanie zachować dokładności na krótkich podjazdach? Ewentualnie czy mach 3 oferuje w ustawieniach zmianę rozdzielczości chwilowej na podjazdy?
2. W sofcie Openbilds można było wpisać wartość dla osi x, y lub z np. 25.760 i brama przejechała do tej wartości koordynatu. Próbowałem to samo zróbić w mach ale póki co nie działa. Czy oraz jak można aktywować te funkcję?
Pozdrawiam Adam
Dopiąłem swego, płytka Arduino poszła do lamusa, na jej miejsce zamontowałem Mach3 USB (ta czerwona) ustawienia zgodnie z wieloma poradnikami (ebmia, kilka dla porównania z netu) ale mam dwa pytania:
1. Uzyskuję duże prędkości 6000mm/min i przyspieszenie 240mm/S2 ale straciłem na dokładności przy krótkich przejazdach, sterowniki ustawione na podział mikrostep 6400, śruba kulowa 1610.
Gdy chce zrobić długi przejazd brama śmiga aż miło, gdy chce przyjechać 5mm silnik wariuje, słychać uderzenie krokowca i brama przesuwa się np o 13mm, przy okazji silnik wyje bo gubi krok.
Czy kosztem dużych prędkości i przyspieszenia nie jestem w stanie zachować dokładności na krótkich podjazdach? Ewentualnie czy mach 3 oferuje w ustawieniach zmianę rozdzielczości chwilowej na podjazdy?
2. W sofcie Openbilds można było wpisać wartość dla osi x, y lub z np. 25.760 i brama przejechała do tej wartości koordynatu. Próbowałem to samo zróbić w mach ale póki co nie działa. Czy oraz jak można aktywować te funkcję?
Pozdrawiam Adam
- 18 wrz 2022, 19:55
- Forum: NASZE AMATORSKIE MASZYNY CNC
- Temat: Mach3 dla serwomotor closeloop
- Odpowiedzi: 33
- Odsłony: 5176
Re: Mach3 dla serwomotor closeloop
Adam Domański & tristar0
Dziękuję, szkoda że takich jak Wy jest niewielu na forach, jak widać można z pełna kulturą i co najważniejsze rzeczowo odpowiedzieć może i na pytanie głupie, ale jak to mówią " nie ma głupich pytań..."

A co do płyty głównej zmienię tak czy siak
Dziękuję, szkoda że takich jak Wy jest niewielu na forach, jak widać można z pełna kulturą i co najważniejsze rzeczowo odpowiedzieć może i na pytanie głupie, ale jak to mówią " nie ma głupich pytań..."


A co do płyty głównej zmienię tak czy siak
- 18 wrz 2022, 17:02
- Forum: NASZE AMATORSKIE MASZYNY CNC
- Temat: Mach3 dla serwomotor closeloop
- Odpowiedzi: 33
- Odsłony: 5176
Re: Mach3 dla serwomotor closeloop
Tuxcnc
Nie wiem co sobie wyobrażasz, ale Twoje wypowiedzi są rodowodem z rynsztoku, brak kultury i taktu to jak Twoje imię i nazwisko.
Powinieneś dostać od razu ban na forum a później od kogoś w mordę.
Czy jest tu ADMIN ?? Czas na działanie .
Ocena i obrażanie kogoś to jak widzę obecnie domena forów, a nie źródło wiedzy i rady.
Kto i gdzie powiedział że wszyscy są nieukami jak może Ty ? Bo ja poświęcam wiele czasu na pogłębienie wiedzy, która zupelnie nie jest związana z moją codziennością.
Czas odpuścić i poszukać inne grono ludzi z wiedza, a nie gębą pełną jadu. Nara
Nie wiem co sobie wyobrażasz, ale Twoje wypowiedzi są rodowodem z rynsztoku, brak kultury i taktu to jak Twoje imię i nazwisko.
Powinieneś dostać od razu ban na forum a później od kogoś w mordę.
Czy jest tu ADMIN ?? Czas na działanie .
Ocena i obrażanie kogoś to jak widzę obecnie domena forów, a nie źródło wiedzy i rady.
Kto i gdzie powiedział że wszyscy są nieukami jak może Ty ? Bo ja poświęcam wiele czasu na pogłębienie wiedzy, która zupelnie nie jest związana z moją codziennością.
Czas odpuścić i poszukać inne grono ludzi z wiedza, a nie gębą pełną jadu. Nara
- 17 wrz 2022, 23:00
- Forum: NASZE AMATORSKIE MASZYNY CNC
- Temat: Mach3 dla serwomotor closeloop
- Odpowiedzi: 33
- Odsłony: 5176
Re: Mach3 dla serwomotor closeloop
Znalazłem podobna wersję zestawu jaki posiadasz tj. UC300, czy uważasz że on również nadaje się do obsługi bez większych problemów ?Adam Domański pisze: ↑17 wrz 2022, 19:49adam-opole pisze:A zatem co polecacie zamiast Arduino,
Możesz taki zestaw jak ja. Działa bez żadnych problemów, łatwa konfiguracja.
Dodane 36 minuty 11 sekundy:
Wygląda to tak:

- 17 wrz 2022, 11:57
- Forum: NASZE AMATORSKIE MASZYNY CNC
- Temat: Mach3 dla serwomotor closeloop
- Odpowiedzi: 33
- Odsłony: 5176
Re: Mach3 dla serwomotor closeloop
A zatem co polecacie zamiast Arduino, żeby można było cieszyć się niezawodna pracę urządzenia? Jak również moc dalej pracować w gkodach.






