



Napisałem prosty program żeby oś cyklicznie zmieniała pozycję +/- 2mm, i na oscyloskopie zobaczyłem takie coś:
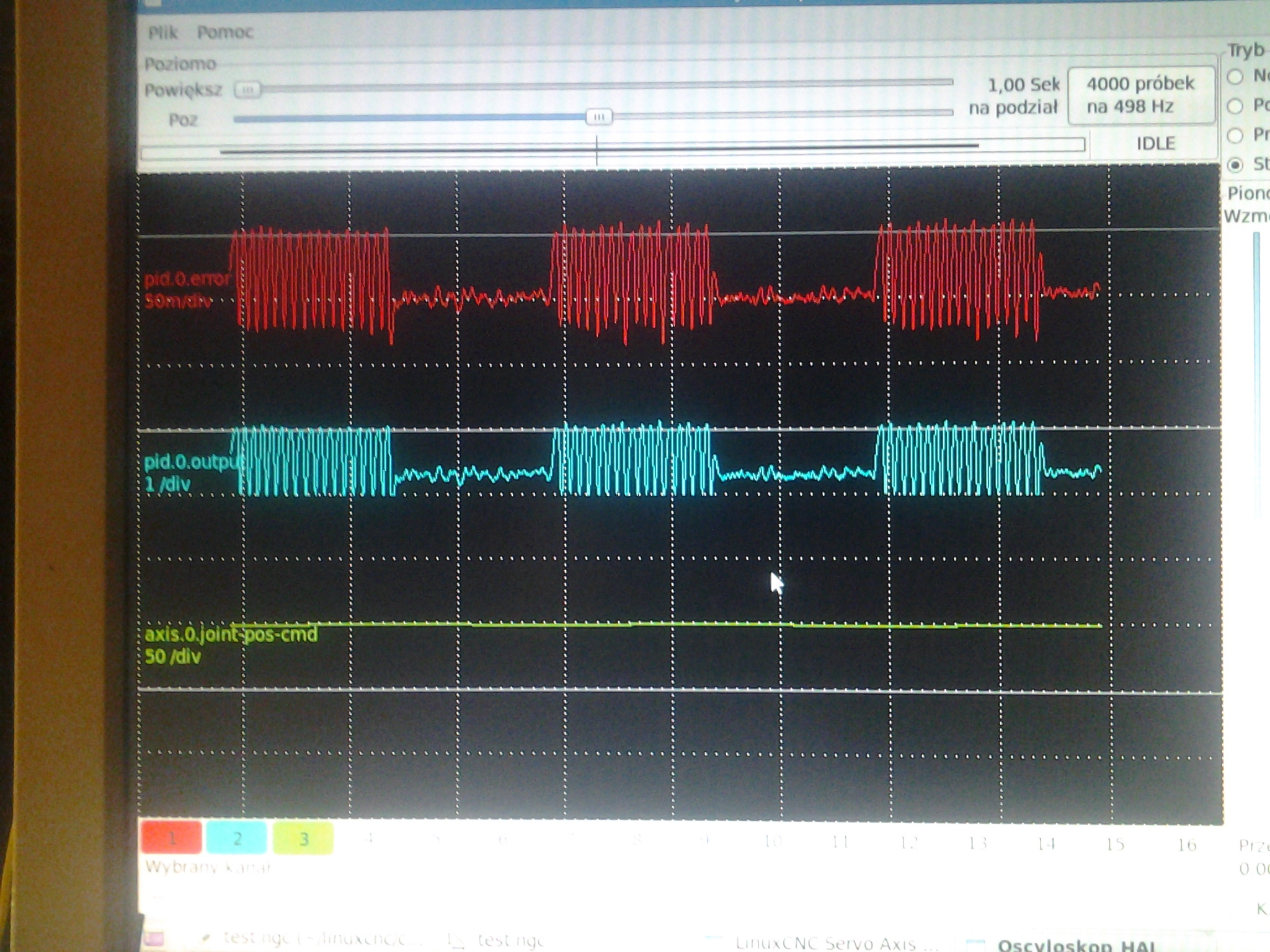
W miejscu gdzie są duże drgania, to sygnały sterujące kierunkiem silnika przełączają się miedzy sobą. Wydaję mi się że źle są skonfigurowane piny portu lpt. W załączniku jest plik HAL do sprawdzenia.
Mam do Was pytania:
Czy wyjścia cyfrowe hala są dobrze skonfigurowane,
Jak stroić regulator PID (najbardziej interesują mnie BIAS; FF0; FF1; FF2)?






