



oto wstępny projekt mojego reprapa.
Założenia:
Pisze tutaj, ponieważ mam zamiar okazjonalnie umieszczać tam jakąś wiertarkę i używać tego jako frezarki do aluminium. Ponieważ ma to być okazjonalnie, jedyne parametry na jakich mi zależy to dokładność i gładkość powierzchni, ale i za to nie mam zamiaru dać się pochlastać, a już na pewno nie zrujnować. Tym bardziej nie zależy mi na takich parametrach jak przyspieszenie, posuw, czy prędkość skrawania. Projekt jest budżetowy, więc nie kupię śrub kulowych i wałków podparych, bo i nie widzę takiej potrzeby dla reprapa.
Jeśli chodzi o działanie w trybie reprapa zamierzam zmaksymalizować prędkości i przyspieszenia posuwu osi x i y szczególnie osi y przy minimalizacji masy głowicy wytłaczającej tworzywo i maksymalizacji precyzji osi na zasadzie albo rybki albo akwarium.
Rysunki:
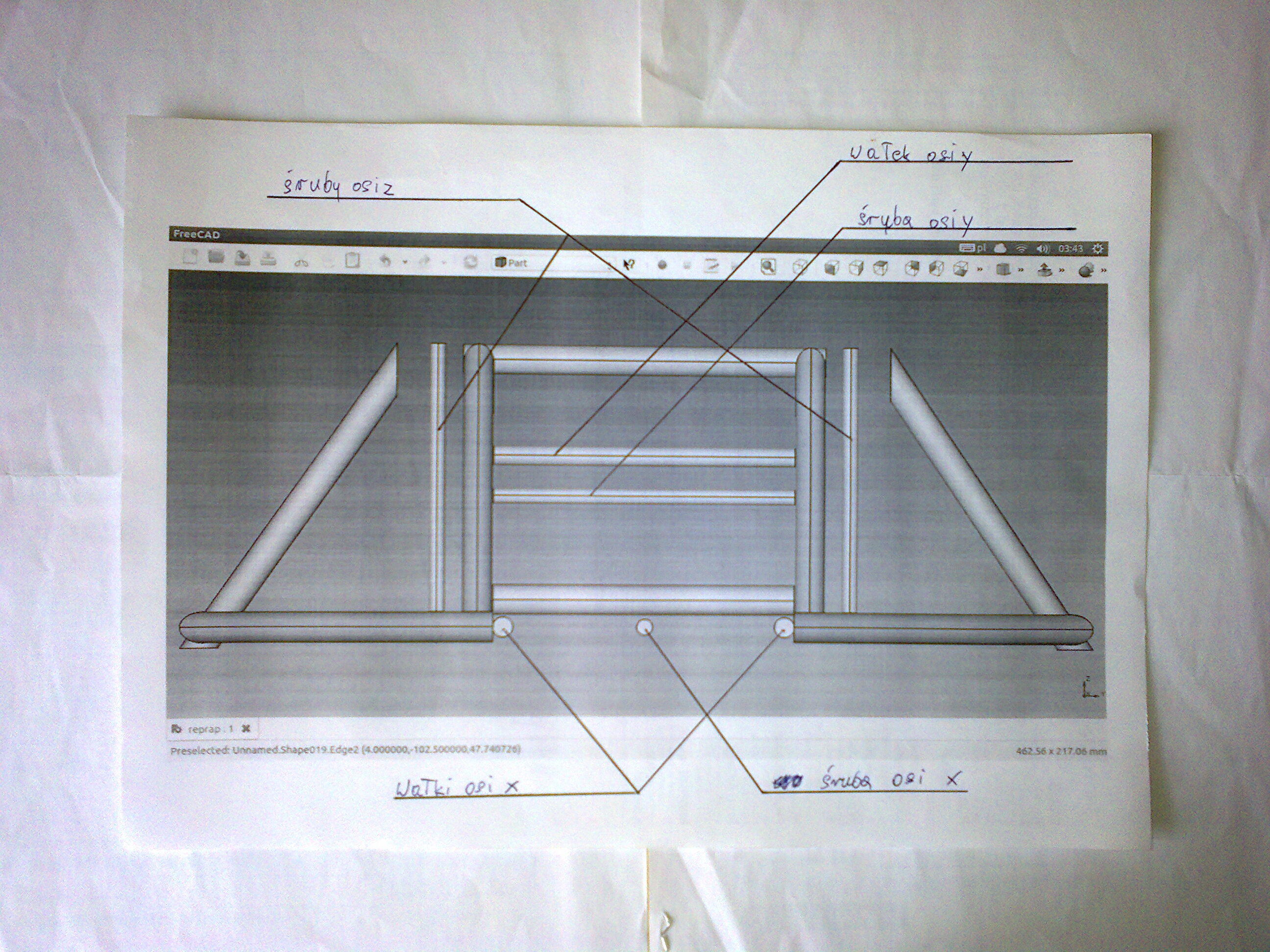
bez podziałki
Tu już w podziałce:
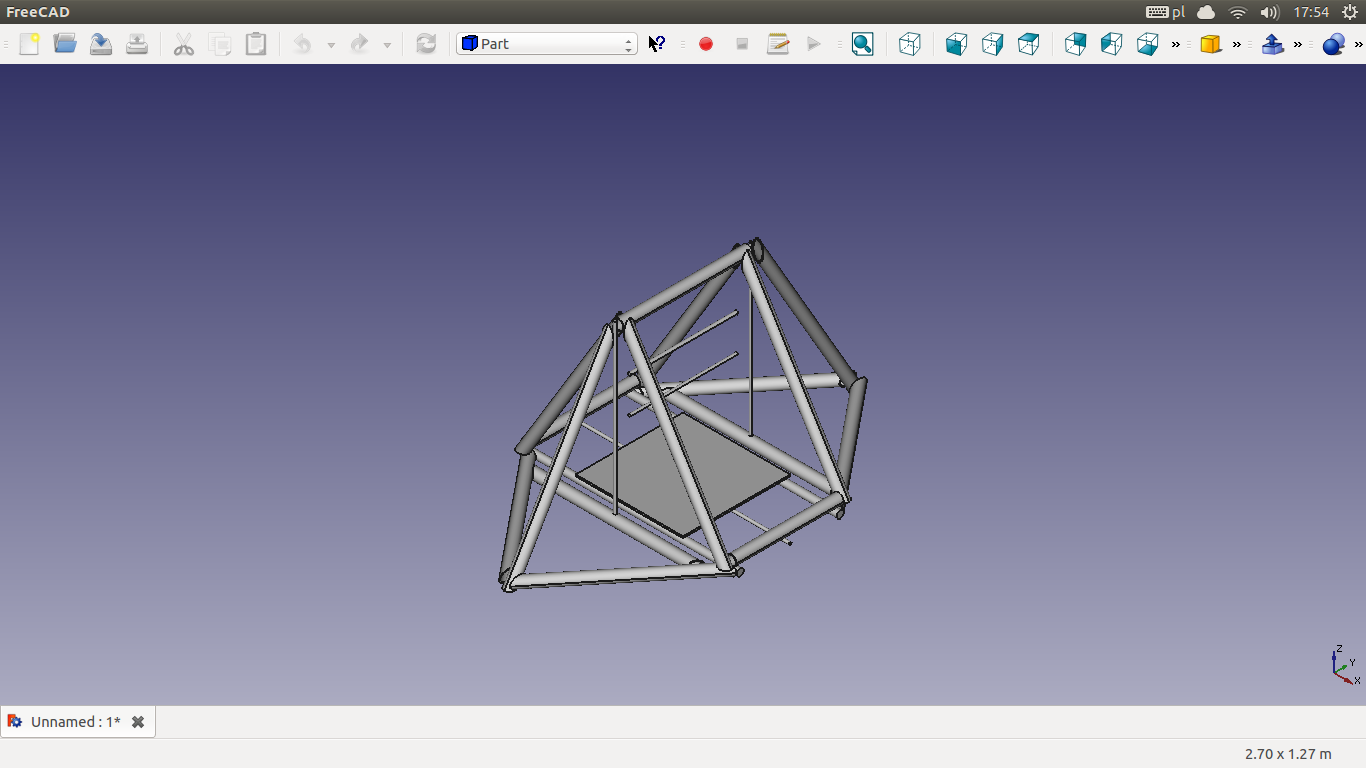
W załączniku pozostałe rzuty w podziałce
Napęd:
Patrząc na różne reprapy przyjąłem:
100 mm/s (6m/min) na osi X
300mm/s (18m/min) albo i 500mm/s (30m/min) na osi Y, ponieważ zamieżam maksymalnie odciążyć głowicę.
Ponieważ oś Z będzie się przesuwać o 2 mm co 10 s przyjmuję 10 mm/s na osi Z.
Stół będzie spoczywał na wałkach wiszących fi 10, ponieważ nie będzie przenosił obciążeń (tylko swój własny ciężar). Łożyska liniowe, kulkowe, najtańsze. Aby wałki były równoległe, zamierazm z jednej strony przymocować go na sztywno do ramy, a z drugiej strony nagwintować wałek i przykręcić go nakrętkami, żeby przesunąć go odrobinę w osiach Y i Z.
Obciążenia będzie przenosić śruba i tu się zastanawiam nad kupnem tr10, ale nie wiem, czy kasowanie luzów przez niewspółosiowość śruby i nakrętki nie zużyje jej szybciej, a jeżeli nakrętka ma się szybko zużywać, to zwiększy wagę kryterium ekonomicznego. Aby osiągnąć 6m/min przy skoku 1,25mm śruba powinna się obracać z prędkością 4 800 RPM. Posiadam silnik o prędkości 6 500 RPM, więc powinno działać.
Ponieważ oś Y ma być maksymalnie odciążona, z pewnością będzie jechać na M8 i jednym wałku wiszącym. Nie wiem tylko jeszcze gdzie znajdę silnik 24 000 RPM, a chciałbym zwiększyć rozdzielczość i zastosować reduktor obrotów.
Jeśli chodzi o oś Z ma chodzić na dwóch osobnych śrubach M8 (w przyszłości będę tak realizował czwartą oś) z mocno niewspółosiowymi nakrętkami (mała prędkość, duża dokładność). Co nieoczywiste dla reprapa zamierzam łożyskować śruby na obu końcach.
Osie X i Y ze względu na duże przyspieszenia w funkcji reprap, zamierzam zamocować na łożyskach stożkowych. Napęd przenoszony będzie wężem ogrodowym. Zamieram też pozwolić nakrętce latać góra – dół, aby nie wywoływać niepotrzebnych naprężeń.
Rama:
Rama zbudowana będzie ze stalowych rur fi 30 o najgrubszej ściance jaką znajdę połączone elementami drukowanymi z ABS. Mocowanie na zasadzie tulejek zaciskowych.
Przykład:

Grzałka:
Grzałka będzie wykonana w sposób następujący:
posmaruję dyszę i drut oporowy pastą sylikonową do procesora
owinę drut włóknem szklanym
owinę dysze drutem tak, żeby pasta, którą posmarowałem dyszę skleiła się z pastą, którą posmarowałem drut.
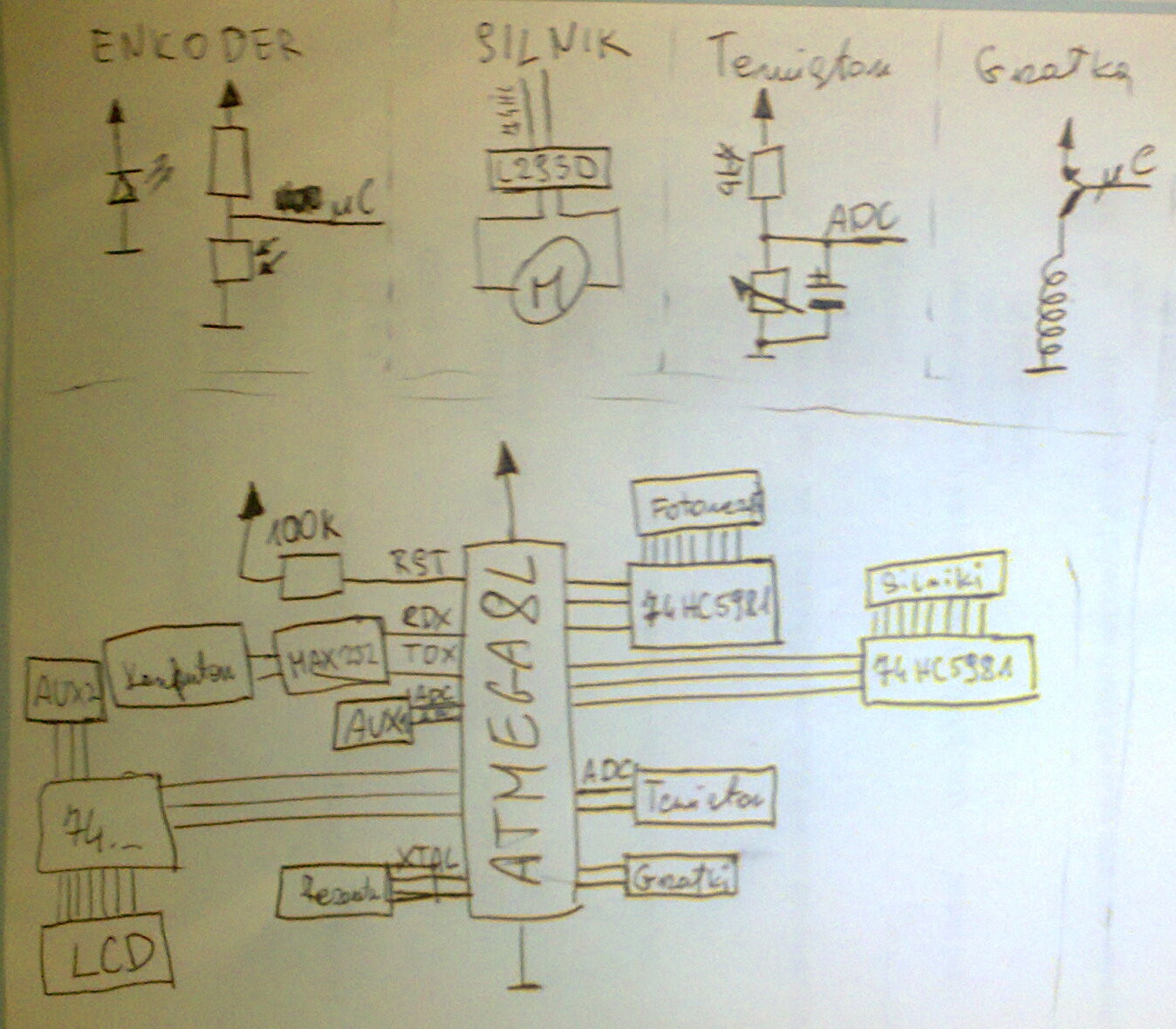
Elektronika:
Silniki będą sterowane przez enkodery optyczne wycięte ze starych kart kredytowych. Nad wszystkim czuwać będzie ATMega8L i kilka rejestrów przesuwnych. Ile się da skopiuję ze sterowników do reprapa, ale mój będzie kosztował 25 zł. Sercem sterownika ma być jego software. Mam nadzieję, że zastosowanie modeli matematycznych logiki rozmytej pozwoli mi napisać inżyniera.
Frezowanie:
Jako wrzeciona zamierzam użyć zwykłej wiertarki przymocowanej uchwytami drukowanymi z ABS. Frezowane będzie max aluminium. Ideałem byłoby zastosowanie silników, których nie musiałbym wymienieć przy każdorazowym frezowaniu. Prędkości posuwu i obrotów mają być minimalne do uzyskania możliwie gładkiej powierzchni.
Rozwój:
W przyszłości mam zamiar uruchomić czwartą oś poprzez niezależne poruszanie śrubami osi Z. Wałek i śruba osi Y musiałyby się wtedy poruszać na prowadnicy.
Do osi Y będzie mógł sam się przymocować trzyosiowy manipulator z wiertareczką do wiercenia otworów w płytkach PCB. Tenże manipulatorek będzie mógł przymocować lutownicę z podajnikiem cyny. W caaałkiem odległej przyszłości oczywiście hot air. Manipulatorek będzie mógł również chwycić dyszę drukującą i „przyspawać” element nawet do chropowatego elementu metalowego.
Tak oto mój reprap będzie w stanie złożyć dowolne urządzenie elektroniczne w wydrukowanej do niego obudowie.
Pytania:
1. Jaka jest zależność dopuszczalnej siły od średnicy śruby? Rozumiem, że mam ją policzyć na wyboczenie. Jaki przyjąć współczynnik bezpieczeństwa?
2. Czy mocne zaciśnięcie śrub poprzez ich niewspółosiowe zamocowanie na osi Z dla uzyskania małych luzów jest mądre?
3. Co sądzicie o osi Y czy szukać silnika 24 000 RPM, czy zastosować pas do przenoszenia obrotu na posuw? Czy pas da radę pociągnąć wrzeciono?
4. Czy łożyska stożkowe to dobry pomysł?
5. Czy wąż ogrodowy jest rozwiązaniem wystarczającym na powyższe parametry?
6. Czy rury są wystarczająco grube? Czy złączki z ABS (ścianka 3 mm) będą dość mocne?
7. Czy nie lepiej wykonać podstawę i bramę z betonu i cegieł i doczepić do tego elementy lączące z ABS?
8. Jeśli chodzi o sztywność, można wykonywać powierzchnie swobodne przy wyższych siłach, i przy większych ugięciach, a powierzchnie nieswobodne przy mniejszych prędkościach i przyspieszeniach przez co mniejszych ugięciach. Mam rację, czy takie podejście grozi uszkodzeniem maszyny?
9. Czy zaciski mi się nie przesuną przy tak dużych prędkościach?
10. Czy taka budowa grzałki nie grozi zwarciem?
11. Czy pasta silikonowa się nie spali? czy nie lepiej użyć innej pasty termoprzewodzącej?
12. Czy nie lepiej darować sobie pastę w ogóle i owinąć to grubo włóknem szklanym?
13. Czy fotorezystory będą działać wystarczająco szybko, żeby ATmega zarejestrowała zmianę stanu (50 kHz)?
14. Czy grzałka obsługa hardwareowa grzałki jest wystarczająca?






