Napięcie "nominalne" to napięcie na chama z prawa Ohma. Przy zasilaniu takim napięciem ze źródła napięciowego silnik uzyska prąd nominalny i będzie trzymał. Problem w tym, że jak chcemy zrobić krok, to prąd fazy musi się zmienić - przy sterowaniu mikrokrokowym o jakąśtam część, przy półkrokowym - od nominalnego do 0 a przy pełnokrokowym musi się wręcz odwrócić! To zajmuje czas, bo indukcyjność silnika przeciwstawia się takim nagłym zmianom prądu.
Prąd w silniku zmienia się z prędkością
dI/dt = U/L, gdzie U to napięcie przyłożone do silnika minus spadek napięcia na oporze.
Ponadto obracający się silnik działa jak prądnica, indukując napięcie o polaryzacji przeciwnej do napięcia zasilającego. Przykładowo moje silniczki o napięciu nominalnym 2.3V przy 1100RPM generowały 15V napięcia wstecznego.
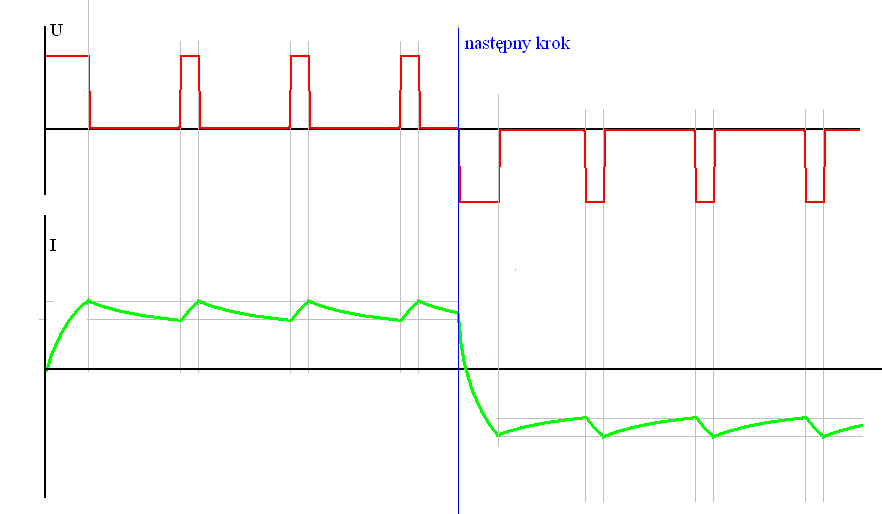
Te dwa czynniki wymuszają stosowanie układu zasilającego prądowo - napięcie jest przykładane do silnika aż do uzyskania zadanego prądu - potem na chwilę jest odłączane, aż prąd spadnie do jakiejśtam wartośći (np. 90% zadanej) albo po prostu na określony czas i podłączane znowu. Układ taki nazywa się chopperem.
Przebieg prądu oraz napięcia zasilającego zgrubnie widać tutaj (dla silnika na postoju):