



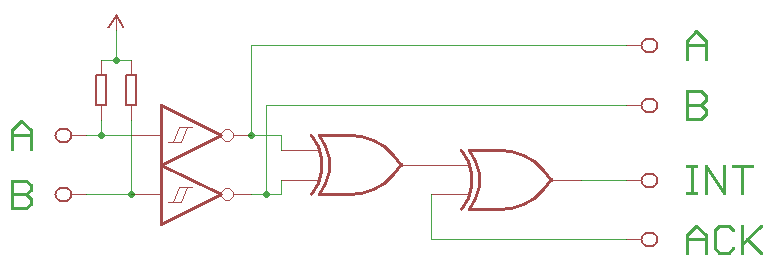
A i B to sygnały enkodera, INT sygnał przerwania do procka, a ACK to ten sygnał, którego stan procedura obsługi przerwania zmienia na przeciwny.
Czyli zmiana stanu INT oznacza dowolną zmianę wyjść enkodera, zanegowanie ACK przywraca poprzedni stan INT, a A i B są wczytywane, żeby sprawdzić co się zmieniło od poprzedniego razu.
Trudno sobie wyobrazić coś prostszego i bardziej niezawodnego.
Ten układ reaguje na każde zbocze i jak niczego nie popieprzysz w programie, to nie masz prawa zgubić nawet jednego impulsu.
To jest pełna kwadratura i możesz sobie kręcić w tę i nazad milion razy, a nie stracisz informacji o położeniu.
A na układ który sygnały z enkodera zlicza w liczniku jednokierunkowym szkoda życia.
.






