Czyli sterowniki te:
- potrafią kontrolować kierunek obrotów i prędkość oraz w przypadku pracy
z różnym oporem będą brać poprawki bo wynika to z natury czujnika halla.
Enkoder jest potrzebny, żeby regulator pid miał dane do wyliczania drogi,
i ten regulator będzie podpięty bezpośrednio do PWM tak jak w chwili obecnej jest
czujnik halla, a więc czujnik halla trzeba będzie odpiąć od PWM i skierować do PID ?
Jeśli dobrze rozumiem to PWM jest w stanie precyzyjnie sterować prądem, tzn
jeśli w chwili obecnej bym zadał aby sterownik kręcił silnikiem 10k rpm to błąd
był by niewielki czyli coś z rzędu kilku/kilkunastu rpm
Jeśli coś pokręciłem to proszę o sprostowanie.
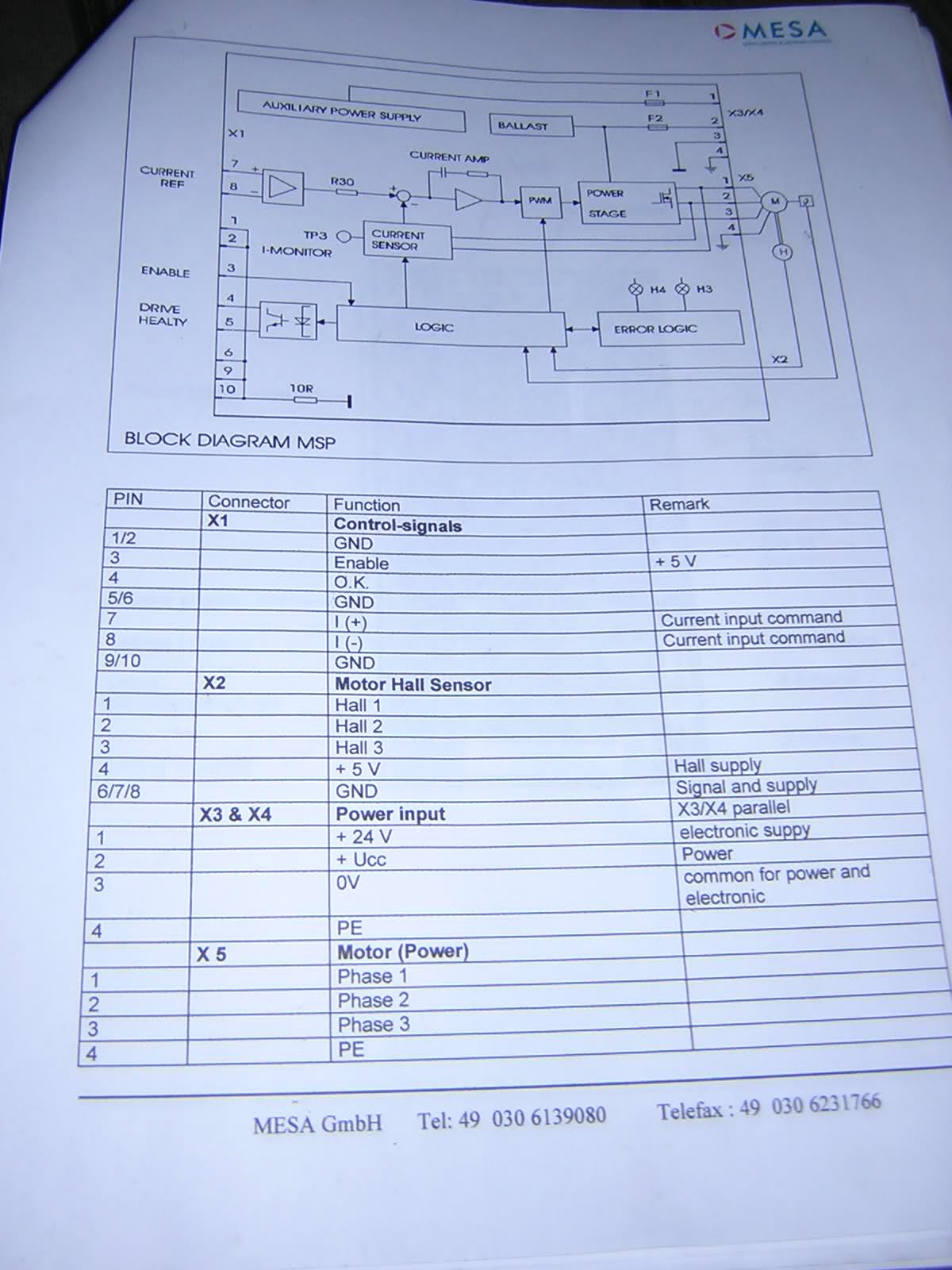
co to jest :
-ballast system (bleeder) ?
-DC BUS albo co dokładnie znaczy całe zdanie,
The output stage requires a DC BUS voltage ?
Przepraszam za laickie pytania

i pozdrawiam