qqaz pisze:
I nic do tego jakie elementy zastosujesz, gałki , kule, przeguby czy jakąś inną siłę woli.
Brakuje jeszcze jednego kontrolowanego punktu.
Jeszcze raz powtarzam jest możliwe utrzymanie pinu bez wyprowadzania następnych ramion typu pantogrf i rozwiązań może być naprawdę sporo
Dajmy spokój, są możliwości i każdy i tak zrobi po swojemu
Mnie bardziej interesuje zamiana G-kodu na Hex i jego zapis
Jaka wersja Mach-a jest potrzebna?
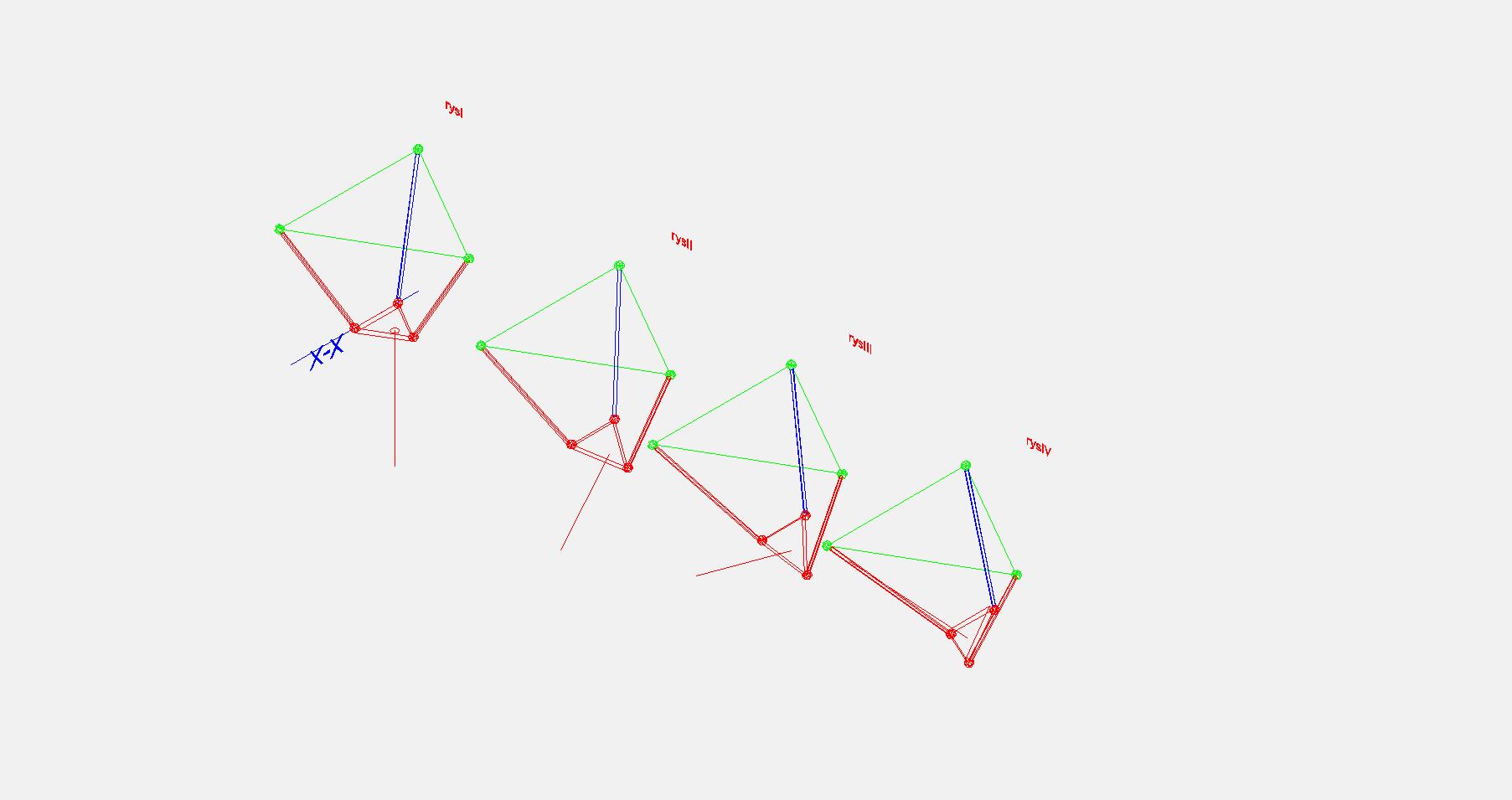
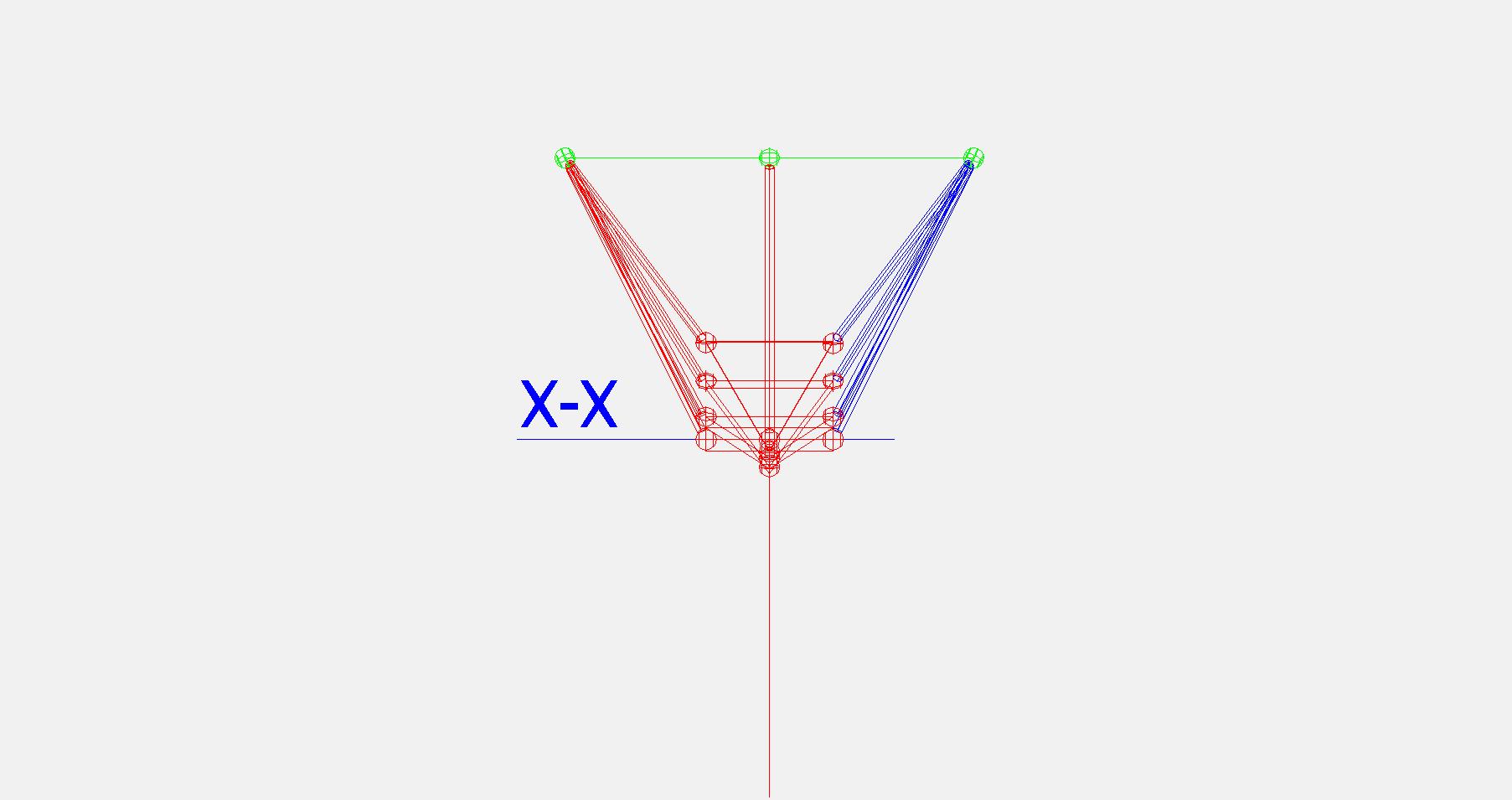
Analizowałem to rozwiązanie kilkanaście lat temu ( 2,5D ) , natomiast bez prowadnic lecz na samych śrubach A,B, ramiona ich przedłużone na zasadzie X-a
Przy prymitywnej konstrukcji można frezować w stali, wtedy nic konkretnego nie znalazłem do sterowania

Odkryłem jednak pewne warunki w pracy serwa które w połączeniu ze enkoderem będzie
można frezować nie zmieniając G-kodu na ramie A,B

Natomiast trzeba napisać programik na procek





")



")


")






