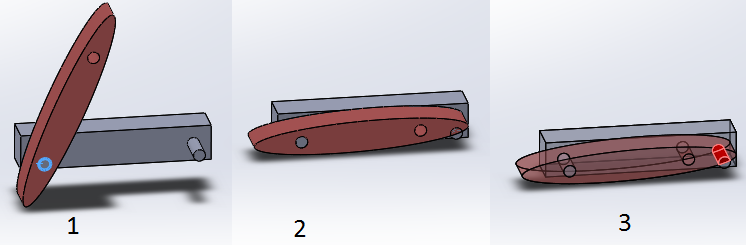
Wrzucam poglądowy rysunek ( wybaczcie jakość ale na szybkosci w paincie robiłem):
Obsługa, Programowanie i Budowa Maszyn Numerycznych







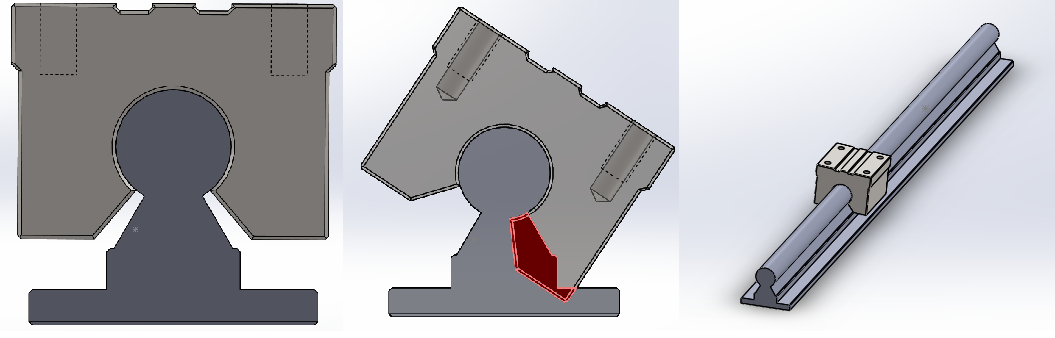
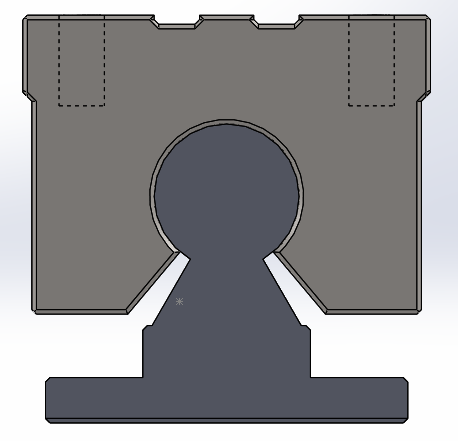
Nie. Jestem na etapie projektowania małej frezarki i chciałbym zacząć od dobrego projektu w trzech wymiarach żeby oszczędzić sobie problemów. Zacząłem od rysunku technicznego prowadnic i łożysk z ich dokumentacji i na moje początkujące oko łożysko miało jakiś zakres ruchu po okręgu nie tylko równoległy:"macałeś" prawdziwą prowadnicę ? ona jest stabilna bez związania wózka ? chyba nie ten typ prowadnicy

")




")
")

